

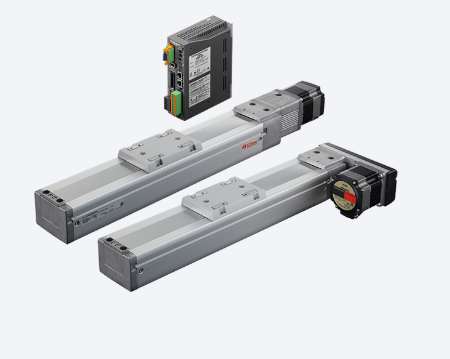
αSTEP AZシリーズ
新開発ABZOセンサ
小型のバッテリレスの機械式アブソリュートセンサです。生産性の向上やコスト削減に貢献します。
モーター、ドライバともに、お求めやすい価格です。
機械式センサ
ABZOセンサは歯車を複数搭載しており、個々の歯車の角度を認識することで位置情報を検出します。
そのためバッテリが不要です。
多回転アブソリュートセンサ
基準となる原点から、モーター軸で±900回転(1800回転分)の絶対位置が検出可能です。
外部センサ不要
アブソリュートシステムのため、原点センサ、リミットセンサなどの外部センサは不要です。
高速原点復帰+原点復帰精度の向上
原点センサ、リミットセンサ無しで原点復帰ができます。センサの感度を気にせず、高速の原点復帰を実現し、マシンサイクルを短縮します。同時に、センサの感度による原点位置のバラつきが起こらなくなります。原点の精度を向上できます。
コストダウン
外部センサにかかる費用や、配線に関する費用がかかりません。システム全体をコストダウンします。
装置設計の自由度が向上
外部センサの設置や配線に必要だったスペースを節約できます。装置設計の自由度を向上させます。
バッテリレス
バッテリ不要の、機械式センサです。位置情報を機械的に管理します。
位置情報を保持
位置決め運転中に電源が遮断されたり、モーター/ドライバ間のケーブルが外されても、位置情報を保持します。
原点復帰運転の時間を削減できます。
メンテナンスの削減
バッテリの交換が不要です。メンテナンスの手間やコストを削減します。

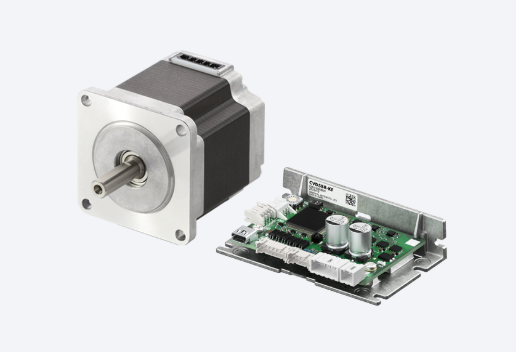
αSTEP AZシリーズ miniドライバ
◆バッテリ電源に対応
・バッテリ電源で使用できる、ワイドな電源電圧仕様です。DC24VとDC48Vに対応しています。以下は、動作可能電圧の範囲です。
◆最適な電流制御で省エネ化
・負荷状況に合わせてモーターへの供給電流を最適化する、サーボエミュレーションモードを搭載しています。
◆自走装置に組み込む場合
・装置の課題 バッテリの駆動時間をなるべく長くしたい。
・miniドライバによる解決策
・装置の総質量を抑える
・大きなトルクが必要ないときはモーターの消費電力を小さくする。
◆装置の負担を減らす軽量設計
・装置自体の質量を減らすことで、車輪駆動軸の消費電力を削減します。
◆据え置き装置に組み込む場合
・装置の課題 ドライバや制御システムを分散設置し、装置全体を小型化したい。
◆miniドライバによる解決策
・コンパクトなドライバなら、様々な空きスペースに設置できる
・モーターとドライバ間の距離が遠くても、接続ケーブルで最大10mまで延長可能
◆省スペース・省配線でモーターとドライバの取り付けを可能にする取付金具を用意
・モーター側面にドライバを設置可能
・モーターとドライバの近接設置で、省スペース設置
・モーターとドライバの接続はケーブル1本で簡単配線

αSTEP AZシリーズ 多軸ドライバ
多軸ドライバの主な特徴
3種類のインターフェース
EtherCAT、MECHATROLINK-Ⅲ、SSCNETⅢ/Hに対応した製品をそれぞれご用意しています。
2軸ドライバ
2軸タイプ
3軸ドライバ
3軸タイプ
4軸ドライバ
4軸タイプ
スリムタイプ(4軸)
NEW
スリムタイプ(4軸)
ロゴマーク
スリムタイプの詳細は、最寄りの支店・営業所またはお客様ご相談センターにお問い合わせください。
省配線、コストダウン
ドライバ1台で複数軸を制御できます。
上位ネットワークに直結し、最大4軸を同時制御できる多軸ドライバ
単軸ドライバを並べるより、コンパクトで省スペースに(2軸タイプ・4軸タイプ)
ネットワーク対応の単軸ドライバを並べるより、設置スペースを省略することができます。
コンパクトで省スペース
サポートソフトに対応
サポートソフト MEXE02でパソコンから簡単駆動
サポートソフト MEXE02を使用することにより、運転データや各種パラメータの設定・編集がおこなえるほか、ティーチング、各種状態のモニタをおこなうことができます。
サポートソフトのダウンロードはこちら
さまざまな機能で、立上げからメンテナンスまでを総合サポート
立ち上げ・評価
配線チェックやテスト運転時に役立つ機能をご用意しています。
運転データの設定と保存
I/Oモニタ
ティーチング・リモート運転
調整
装置設置後のモーター動作の調整に役立つ機能をご用意しています。
波形モニタ
診断・メンテナンス
運用開始後のトラブル時の診断やメンテナンスに役立つ機能をご用意しています。
アラームモニタ
ユニット情報モニタ
ステータスモニタ
運転データ/パラメータ設定画面
運転データ/パラメータ設定画面
波形モニタ
波形モニタ
サポートソフトの機能詳細はこちら
動画でわかる用途例
パラレルリンクロボット
6軸アームロボット
タイピングロボット
円弧補間運転
さまざまなモーター・メカと組み合わせが可能
多軸ドライバと接続可能な製品は以下の通りです。
詳細は、最寄りの支店・営業所またはお客様ご相談センターにお問い合わせください。
モーター(DC電源入力)
シリーズ名 製品イメージ(代表例) 概要
αSTEP
AZシリーズ AZシリーズ
多軸ドライバと、モーター・電動アクチュエータの接続には、専用の接続ケーブル(別売り)が必要です。
接続するモーター・電動アクチュエータの軸数分、必ずご用意ください。

ステッピングモーター(真空タイプ)
真空タイプモーターの特徴と構造
真空タイプモーターの特徴と構造
放出ガスを抑えるため、モーターケースにはアルミ、ステンレス鋼を使用し、表面は塗装していません。また、軸受けには真空用グリースを使用しています。
放出ガスは、通常のクリーンな環境に見られる成分と同じなので、真空環境を汚染する心配はありません。
ベーキング処理の温度にも耐えられるように耐熱用の巻線を使用しています。
真空タイプモーターのメリット
装置を小型化し、設計の自由度を拡大
大気中にモーターを設置する場合、回転導入機などを使用するため装置が大型になります。真空タイプは、真空環境内にモーターを設置できるため装置を小型化できます。さらにαSTEP ARシリーズなら位置確認用のセンサが不要になるためコストダウンにも貢献します。
部品点数・スペース削減01
部品点数・スペース削減01
αSTEP ARシリーズなら、エンコーダ無しで位置監視が可能
αSTEP ARシリーズは、クローズドループ制御によりモーターの情報を監視するほか、各種アラーム出力機能を搭載しています。高額の真空対応型エンコーダは不要になります。
ローター位置検出センサ
ローター位置検出センサ(レゾルバ)を搭載しモーターの情報を検出し、モーターを制御します。
真空中でさまざまな動きを実現
半導体製造装置や、電子顕微鏡をはじめとする計測機器など、さまざまな用途に採用されています。
真空チャンバー
ステージの種類
真空タイプのモーターは、回転導入機では設計が困難な、真空環境下での多軸ステージに対応します。真空中で複数軸の組み合わせが可能となり、より複雑な動きを実現させることができます。
多軸ステージにも対応
低損失のαSTEP ARシリーズは、真空中の解析、加工用途に最適です
低真空中の物資解析、高出力レーザー加工、真空成膜など、真空環境下での位置決め用途で活躍します。
電動スライダEZSシリーズ
スライダ部の特徴
高剛性・高精度
剛性の高いガイドを採用することで小型ながら高い許容モーメントを実現しました。
高剛性、高精度ガイド
ガイドにはTHK製LMガイド※を採用しています。
薄型のステンレスガイドで高いモーメントを受けられます。
※ THK株式会社の登録商標です。
走り平行度 0.03mm以下
薄型ながら高可搬質量を実現
薄型ながら高可搬質量を実現
高許容モーメント
小型でありながら高いモーメントを実現しました。
高許容モーメント
※ EZSM6の場合です。
ローリング方向の許容モーメント値 [N・m]
型番 静的許容モーメント 動的許容モーメント
EZSM3 52.0 10.5
EZSM4 176 27.8
EZSM6 340 55.6
重負荷の高速駆動が可能
重負荷でも短距離を高速駆動
最短位置決め時間が簡単に算出できます
当社電動アクチュエータの該当製品について、「機種」「運転条件」に合わせて目安となる位置決め時間を算出できるサポートツールをご用意しています。
狭いスペースにも設置
スペースの余裕がない場合にも適した製品構造です。
省スペース
周辺機器との干渉回避
モーターの取付方向は4方向に変更できるため、設置場所に合わせてケーブルの引き出し方向を自由に変えることができます。
ケーブル引出口変更可能
折返しタイプで全長を短縮
折返しタイプはストレートタイプに比べ全長が最大136.4mm短いため装置の省スペースに貢献します。
折返しタイプ
簡易防塵構造
ステンレスシートを採用した簡易防塵構造によって異物の侵入を防止し、発塵も抑制します。
異物侵入防止
ステンレスシート使用による簡易防塵構造により外部からの異物の侵入を防ぎます。
発塵抑制
テーブル部に低発塵のローラー構造を搭載し、ステンレスシートと転がり接触することで、磨耗粉の発生を防ぎます。

電動シリンダ EACシリーズ
シリンダ部の特徴
軽負荷から高負荷まで高速駆動が可能
EACM6タイプの場合
EACM6タイプの場合
高速駆動特性
最短位置決め時間が簡単に算出できます
当社電動アクチュエータの該当製品について、「機種」「運転条件」に合わせて目安となる位置決め時間を算出できるサポートツールをご用意しています。
低速でも速度ムラが少ない安定した動き
クローズドループステッピングモーターのマイクロステップ駆動により、減速機構などの機械的要素なしに分解能を上げることができます。このため低速(1.25mm/s)でも速度ムラが少なく、一定の速度を保ち続けます。
低速運転
小型・高推力シリンダ
ロッド部にアルミニウムを採用した、小型・軽量ながら高推力な電動シリンダです。
振動抑制構造にしたことにより、加速特性が向上し高速位置決め運転が可能です。
小型・高推力シリンダ
豊富なシリンダバリエーション
ラインアップ
EACシリーズはストレートタイプの他に折り返しタイプをご用意しています。さらに、それぞれのタイプはシリンダ形状にシャフトガイド無し、シャフトガイド付とシャフトガイドカバー付の3種類をご用意しています。

コンパクト電動シリンダ DRシリーズ
主な特徴
αSTEPとボールねじを一体化した構造
高精度なαSTEPとボールねじを組み合わせることで、高精度な位置決めを実現
カップリングなどの連結部品を使用せず、中空ローターとボールねじナットを一体化することで、部品の剛性や組み合わせによるバックラッシの影響を抑えています。
DRシリーズ 内部構造
2種類の駆動用ボールねじ
駆動ボールねじ 精密 転造
繰り返し位置決め精度 ±0.003mm ±0.01mm
最小移動量 0.001mm
高可搬質量と高速運転を実現※
リード 1mm 2.5mm
可搬質量 水平 4kg 4kg
垂直 4kg 2kg
最高速度 40mm/s 100mm/s
※ 表中の仕様値は、取付角寸法28mmテーブルタイプの場合。
最短位置決め時間が簡単に算出できます
当社電動アクチュエータの該当製品について、「機種」「運転条件」に合わせて目安となる位置決め時間を算出できるサポートツールをご用意しています。
駆動モーターにαSTEP AZシリーズを搭載
バッテリレスのアブソリュートセンサ内蔵、外部センサ不要でモーター位置情報を常時監視
クローズドループ制御による高信頼性
高効率化により、モーター発熱低減、省エネルギー
ABZOセンサ
安定した微細送りが可能
αSTEPを搭載しているため、1stepずつの微細な動作を安定して繰り返すことが可能です。カメラやレンズの微調整に最適です。
DRシリーズ 微細送り
低速でなめらかな動き
マイクロステップ駆動、スムースドライブ機能※により低速での振動を抑え、なめらかに動かすことができます。シリンジから溶液を安定して供給する駆動軸に最適です。
※ パルス入力の設定を変えることなく、フルステップのときと同じ移動量、速度で自動にマイクロステップ駆動する制御です。
DRシリーズ 低速でなめらか
装置の小型化・軽量化に貢献
αSTEPとボールねじを一体化したコンパクトボディで、装置の小型化・省スペース化に貢献することができます。
装置先端の軽量化により、設計の自由度の向上が期待できます。

コンパクト電動シリンダ DRS2シリーズ
主な特徴
αSTEPとボールねじを一体化した構造
高精度なαSTEPとボールねじを組み合わせることで、高精度な位置決めを実現
カップリングなどの連結部品を使用せず、中空ローターとボールねじナットを一体化することで、部品の剛性や組み合わせによるバックラッシの影響を抑えています。
DRS2シリーズの内部構造
2種類の駆動用ボールねじ
駆動ボールねじ 精密 転造
繰り返し位置決め精度 ±0.003mm ±0.01mm
最小移動量 0.001mm
高可搬質量と高速運転を実現※
リード 2mm 8mm
可搬質量
(水平方向、垂直方向共通) 10kg 5kg
最高速度 50mm/s 200mm/s
※ 表中の仕様値は、取付角寸法42mm ガイド付タイプの場合。
最短位置決め時間が簡単に算出できます
当社電動アクチュエータの該当製品について、「機種」「運転条件」に合わせて目安となる位置決め時間を算出できるサポートツールをご用意しています。
駆動モーターにαSTEP AZシリーズを搭載
バッテリレスのアブソリュートセンサ内蔵、外部センサ不要でモーター位置情報を常時監視
クローズドループ制御による高信頼性
高効率化により、モーター発熱低減、省エネルギー
ABZOセンサ
安定した微細送りが可能
αSTEPを搭載しているため、1stepずつの微細な動作を安定して繰り返すことが可能です。カメラやレンズの微調整に最適です。
DRシリーズ 微細送り
低速でなめらかな動き
マイクロステップ駆動、スムースドライブ機能※により低速での振動を抑え、なめらかに動かすことができます。シリンジから溶液を安定して供給する駆動軸に最適です。
※ パルス入力の設定を変えることなく、フルステップのときと同じ移動量、速度で自動にマイクロステップ駆動する制御です。
DRシリーズ 低速でなめらか
装置の小型化・軽量化に貢献
αSTEPとボールねじを一体化したコンパクトボディで、装置の小型化・省スペース化に貢献することができます。
装置先端の軽量化により、設計の自由度の向上が期待できます。
装置の小型化・軽量化に貢献
タイプや付加機能を自由に組み合わせ可能
ガイド付タイプ
シリンダに負荷を固定できる高剛性ガイドを付けた製品です。
負荷の直接取り付けが容易です。
ガイド付タイプ
ガイドなしタイプ
ガイドなどがないコンパクト形状のため、装置に直接組み込むことが可能です。
また、装置の負荷搬送用ガイド部にコンパクトな推力軸としてご使用いただける製品です。
ガイドなしタイプ
ガイド付・ガイドなしタイプに電磁ブレーキ付をラインアップ
無励磁作動型の電磁ブレーキ付をラインアップ。電源OFF時に停止位置を保持できます。垂直方向に取り付けても、メンテナンスの作業中にワークが落下する心配がありません。

ラック・ピニオンシステム Lシリーズ
主な特徴
コンパクトサイズで最大可搬質量100kgを実現
最大可搬質量100kg
ピニオンの大径化に伴い、歯車強度がアップしたことで最大可搬質量100kgを実現
最長ストローク1000mm
100~1000mmのストロークをラインアップ
コンパクトサイズで最大可搬質量100kgを実現
電動スライダとの比較
ラック・ピニオンシステムは、モーメントを考慮しない取り付けであれば、可搬質量分をそのまま搬送できます。
<ボールねじ機構の電動スライダの場合>
ボールねじ機構の電動スライダの場合
<ラック・ピニオンシステムの場合>
ラック・ピニオンシステムの場合
ラック・ピニオンシステムの概要
ラック・ピニオンシステムは、モーターの回転運動を直線運動に簡単に変換できます。
直線機構部はコンパクトな設計ながら、高強度加工を施していることにより、大きな負荷を搬送することができます。
ラック・ピニオンシステムの概要
設計の効率化に貢献
装置立ち上げまでの時間を短縮
ラック・ピニオンシステムは、従来ご使用いただいている部品を削減したり、設計・組み立てにかかる工数を大幅に減らすことができます。
省スペース化
ラック両端のねじ穴を固定して本体部を自走できます。モータースペースが確保できないような大きさの装置に効果的です。

ラック・ピニオンシステム LJリニアヘッド
主な特徴
コンパクトサイズで最大可搬質量200kgを実現
最大可搬質量200kg
ピニオンの大径化に伴い、歯車強度がアップしたことで最大可搬質量200kgを実現
最長ストローク700mm
100~700mmのストロークをラインアップ
コンパクトサイズで最大可搬質量200kgを実現
電動スライダとの比較
ラック・ピニオンシステムは、モーメントを考慮しない取り付けであれば、可搬質量分をそのまま搬送できます。
<ボールねじ機構の電動スライダの場合>
ボールねじ機構の電動スライダの場合
<ラック・ピニオンシステムの場合>
ラック・ピニオンシステムの場合
ラック・ピニオンシステムの概要
ラック・ピニオンシステムは、モーターの回転運動を直線運動に簡単に変換できます。
直線機構部はコンパクトな設計ながら、高強度加工を施していることにより、大きな負荷を搬送することができます。
ラック・ピニオンシステムの概要
設計の効率化に貢献
設計から立ち上げまでの時間を短縮
ラック・ピニオン機構を自作する場合と比べて使用している部品点数の削減、設計・組み立てにかかる工数を減らすことができます。
構成部品の比較
省スペース化
ラック両端を固定してモーター自体を自走させることができます。モータースペースの確保が難しい装置に効果的です。

電動グリッパ EHシリーズ
主な特徴
多種多様なワークに、「デリケートなつかみ」でアプローチ
運転電流を1%単位で設定できるため、把持力の繊細な調整が可能です。
つかむ
傷つきやすく、変形しやすいワークの把持が可能。
電子部品
3つ爪タイプは、球体、円筒形や変形しやすいワークの把持に最適。
EHシリーズ3つ爪球把持
そろえる
ワークの向きそろえ、位置そろえが可能。
ワークの位置揃え、方向揃えが可能。
EHシリーズ3つ爪円筒把持
測定する
ワークの大きさ判定、大きさ測定が可能。

中空ロータリーアクチュエーター DGⅡシリーズ
アクチュエータ部の特徴
AZシリーズ搭載を例に、DGⅡシリーズの特徴をご紹介します。
負荷のダイレクト締結が可能
慣性モーメントの大きいテーブルやアームなどを直接取り付けることができるため、連結部品(カラー)が不要になり、設計や組付けの手間、部品コストの削減が図れます。
DG2シリーズ直接取付
大口径中空出力テーブル
中空穴をケーブルの配線や、エアーや液体の配管に利用できます。
中空径
例:DGM200Rの場合
用途例
液体を配管した充填装置
高強度
重くて大きいワークも駆動可能
最大許容アキシアル荷重が4000N。最大許容モーメントが100N・m。質量や慣性モーメントが大きなワークでも駆動できます。
運転例
面振れが小さい
出力テーブル中央から離れた位置にワークを載せることができます。
負荷モーメントと変位量の関係
テーブル中央部からL=100mm離れた位置での変位量
テーブル中央部からL=200mm離れた位置での変位量
高い位置決め精度
モーター縦方向 モーター横方向 モーター横方向(脚取付)
バックラッシ ノンバックラッシ 3〜10 arcmin 6 arcmin
繰り返し位置決め精度 ±15 arcsec (±0.004°) ±15 arcsec (±0.004°) ±30 arcsec (±0.008°)
装置の立ち上げ時間を短縮する一体型構造
「設計」「組み立て」「調整」にかかる時間を削減
出力テーブルには、装置のテーブルやアームを直接取り付けることができます。

ステッピングモーター RKⅡシリーズ
装置のトータルコストを削減
装置を小型化できます
ドライバの内部部品の最適配置により、小型・薄型を実現。複数台を密着させた取り付けが可能になり、これまでと同じスペースの中で使用軸数を増やすことも可能です。
密着取付時は周囲温度0~40℃でご使用いただけます。
装置を小型化
消費電力を最大47%減
モーター材質の最適化によって損失を大幅に低減、消費電力も最大で47%削減しました。
電気料金はもちろんCO2排出量の低減にも貢献します。
※ 高効率モーターの詳細はこちらをご覧ください。
消費電力量比較
消費電力量比較
運転条件
回転速度
1000r/min
負荷トルク
0.47N・m
使用時間
24時間運転
(運転70%、待機25%、停止5%)、365日/年
消費電力量などの比較
RK2と従来品との消費電力量などの比較
装置内の熱の影響を低減
モーターの損失を低減させたことで発熱も低減。密閉された装置内での他の機器に与える熱の影響を減らし、ファンや放熱板による発熱対策の手間やコストを削減します。
同一条件運転時のモーター外被温度比較
同一条件運転時のモーター外被温度比較
サーモグラフィーによる温度分布
サーモグラフィーによる温度分布
RKⅡシリーズと従来品との発熱量やモーター表面温度の比較デモンストレーション
装置の信頼性を高める性能・機能
高精度な位置決め
RKⅡシリーズの位置決め精度は、±0.05゜(±3min)です。下図のようなボールねじと組み合わせて使用した場合、位置決め精度は、±1.4µmになります。一般的な研削ボールねじの精度は±10µmですので、それと比較しても、十分に高精度な位置決め運転が可能です。

ステッピングモーター PKPシリーズ
性能の向上
低振動・高トルク・高効率化についてご紹介します。
低振動化
フルデジタル制御のフルタイムマイクロステップ駆動によって振動レベルを大幅に改善し、全速度域で低振動化を実現しました。
全速度域で振動特性を大幅に改善
全速度域で振動特性が大幅に改善
5相モーターでさらに低振動化
5相モーターでさらに低振動化
概要や特性、特徴の詳細はこちら(テクニカルレポート)
高トルク化
高電流駆動ドライバと、最適巻線設計モーターの組み合わせで高トルク化を実現演しました。
PKPシリーズ モーター:巻線設計の見直しによる高トルク化
CVDシリーズ ドライバ:駆動回路の高効率化により高電流駆動が可能
2相モーター 低速域でトルクアップ
2相モーター 低速域でトルクアップ
5相モーター 全速度域でトルクアップ
5相モーター 全速度域でトルクアップ
高効率設計
CVDシリーズは、従来品に比べて出力電流を増加することで高トルク化を実現しました。出力電流を増加できるように、発熱量低減を配慮した設計になっています。
ドライバの制御と回路技術(テクニカルレポート)
ドライバの特徴
業界最小クラスの高性能ドライバ
省スペース化に貢献する小型・軽量ドライバです。2相と5相のドライバは、サイズ・取付・I/Oと電源コネクタが共通です。
5相ステッピングモーター PKPシリーズフルクローズド制御タイプ
性能の向上
高精度
5相のPKPシリーズはステップ角度が0.72°(高分解能タイプ0.36°)・停止精度± 0.05°のため、高精度の位置決めが可能です。また、マイクロステップ駆動のドライバで制御したときの静止角度誤差はフルステップ駆動時とほぼ変わらず高精度です。
マイクロステップでも停止精度が悪化しない
(5相CVDシリーズドライバ+5相PKPシリーズモーター)
5相フルステップ停止精度
5相マイクロステップ停止精度
低振動化
5相のPKPシリーズは基本ステップ角度が0.72°(高分解能タイプ0.36°)と小さいため、基本ステップ角度1.8°の2相ステッピングモーターより低振動・低騒音です。また、マイクロステップ駆動のドライバで制御することでさらに低振動・低騒音駆動が可能です。
2相ステッピングモーターの振動特性例
2相ステッピングモーターの振動特性例
5相ステッピングモーターの振動特性例
5相ステッピングモーターの振動特性例
概要や特性、特徴の詳細はこちら
小型・薄型コネクタを採用
小型・薄型コネクタを採用したPKPシリーズは、コネクタ部の張り出しが低くなりました(一部製品は除く)。また引き出し方向が上向きになったことで、 モーターケーブルの引き出し方向の自由度がアップしました。
ドライバの特徴
高効率設計
CVDシリーズは、従来品に比べて出力電流を増加することで高トルク化を実現しました。出力電流を増加できるように、発熱量低減を配慮した設計になっています。
ドライバの制御と回路技術
業界最小クラスの高性能ドライバ
CVDシリーズは、省スペース化に貢献する小型・軽量ドライバです。
ドライバサイズ
質量 : 20 ~ 70g(ドライバの種類で異なります。)
ステッピングモーター PKPシリーズRS-485通信タイプドライバ
性能の向上
低振動・高トルク・高効率化についてご紹介します。
低振動化
フルデジタル制御のフルタイムマイクロステップ駆動によって振動レベルを大幅に改善し、全速度域で低振動化を実現しました。
全速度域で振動特性を大幅に改善
2相モーター 全速度域で振動特性を大幅に改善
5相モーターでさらに低振動化
5相モーターでさらに低振動化
概要や特性、特徴の詳細はこちら(テクニカルレポート)
高トルク化
高電流駆動ドライバと、最適巻線設計モーターの組み合わせで高トルク化を実現演しました。
PKPシリーズ モーター:巻線設計の見直しによる高トルク化
CVDシリーズ ドライバ:駆動回路の高効率化により高電流駆動が可能
2相モーター 低速域でトルクアップ
2相モーター 低速域でトルクアップ
5相モーター 全速度域でトルクアップ
5相モーター 全速度域でトルクアップ
高効率設計
CVDシリーズは、従来品に比べて出力電流を増加することで高トルク化を実現しました。出力電流を増加できるように、発熱量低減を配慮した設計になっています。
ドライバの制御と回路技術(テクニカルレポート)
ドライバの特徴
業界最小クラスの高性能ドライバ
省スペース化に貢献する小型・軽量ドライバです。2相と5相のドライバは、サイズ・取付・I/Oと電源コネクタが共通です。

2相ステッピングモーター PKP/PKシリーズ
性能の向上
高トルク化
モーター巻線設計の見直しにより、高電流化が可能になりました。 低速域から高速域までトルクアップを実現しています。
同サイズでの回転速度-トルク特性比較
同サイズでの回転速度-トルク特性比較
励磁最大静止トルクの比較
励磁最大静止トルクの比較
省エネルギー・省電力
モーターに供給する運転電流を下げることで、従来の製品と同等なトルクを得ながらも消費電力量、CO2排出量の低減を実現できます。
消費電力量・CO2排出量 従来比56%減(当社比)
消費電力量・CO2排出量 従来比56%減
回転速度 0.1kHz (30r/min)
稼働時間 24時間、365日
運転状況 運転50%、待機50%
電源電圧 DC24V
CO2係数 0.519㎏-CO2/kWh
低振動化
磁気設計の見直しにより、従来品よりさらなる低振動を実現しています。
ダウンサイジングによる省資源
従来品に比べ、大幅にトルクを向上させました。同等のトルクで比較した場合、PKPシリーズを使用することでモーターをダウンサイジングすることができます。装置の省スペース化、軽量化に貢献します。
小型・薄型コネクタを採用
小型・薄型コネクタを採用したPKPシリーズは、コネクタ部の張り出しが低くなりました(一部製品は除く)。また引き出し方向が上向きになったことで、 モーターケーブルの引き出し方向の自由度がアップしました。
5相ステッピングモーター PKP/PKシリーズ
性能の向上
高精度
5相のPKPシリーズはステップ角度が0.72°(高分解能タイプ0.36°)・停止精度± 0.05°のため、高精度の位置決めが可能です。また、マイクロステップ駆動のドライバで制御したときの静止角度誤差はフルステップ駆動時とほぼ変わらず高精度です。
マイクロステップでも停止精度が悪化しない
(5相CVDシリーズドライバ+5相PKPシリーズモーター)
5相フルステップ停止精度
5相マイクロステップ停止精度
低振動化
5相のPKPシリーズは基本ステップ角度が0.72°(高分解能タイプ0.36°)と小さいため、基本ステップ角度1.8°の2相ステッピングモーターより低振動・低騒音です。また、マイクロステップ駆動のドライバで制御することでさらに低振動・低騒音駆動が可能です。
小型・薄型コネクタを採用
小型・薄型コネクタを採用したPKPシリーズは、コネクタ部の張り出しが低くなりました(一部製品は除く)。また引き出し方向が上向きになったことで、 モーターケーブルの引き出し方向の自由度がアップしました。

5相ステッピングモーター 真空タイプ
真空タイプモーターの特徴と構造
真空タイプモーターの特徴と構造
放出ガスを抑えるため、モーターケースにはアルミ、ステンレス鋼を使用し、表面は塗装していません。また、軸受けには真空用グリースを使用しています。
放出ガスは、通常のクリーンな環境に見られる成分と同じなので、真空環境を汚染する心配はありません。
ベーキング処理の温度にも耐えられるように耐熱用の巻線を使用しています。
真空タイプモーターのメリット
装置を小型化し、設計の自由度を拡大
大気中にモーターを設置する場合、回転導入機などを使用するため装置が大型になります。真空タイプは、真空環境内にモーターを設置できるため装置を小型化できます。さらにαSTEP ARシリーズなら位置確認用のセンサが不要になるためコストダウンにも貢献します。
αSTEP ARシリーズなら、エンコーダ無しで位置監視が可能
αSTEP ARシリーズは、クローズドループ制御によりモーターの情報を監視するほか、各種アラーム出力機能を搭載しています。高額の真空対応型エンコーダは不要になります。
ローター位置検出センサ
ローター位置検出センサ(レゾルバ)を搭載しモーターの情報を検出し、モーターを制御します。
真空中でさまざまな動きを実現
半導体製造装置や、電子顕微鏡をはじめとする計測機器など、さまざまな用途に採用されています。
5相ステッピングモーター用ドライバ CVDシリーズ フルクローズド制御タイプ
ステッピングモーターのフルクローズド制御
位置決め開始時はステッピングモーターの高応答を活かしたオープンループ制御をおこない、位置指令が完了した時点から、外部センサのフィードバックを使った位置補正をおこないます。
フルクローズド制御
高精度位置決めを実現
フルクローズド制御により、機構上での位置を直接フィードバックして、指令位置に対する検出位置の差分を補正します。サブミクロンの高精度な位置決めが求められる装置の設計に貢献します。
サーボモーターのように機構に合わせたゲイン調整が不要です。常にエンコーダのフィードバックを利用した位置決め運転をしないため、ベルトプーリーやカムなど機構や負荷にあわせた調整が不要になります。
ハンチングなしで停止位置を保持
位置決め完了時にハンチングがなく、モーター自身の保持力によって停止します。停止に振動があると困る用途に最適です。
高精度位置決めを実現
機構に合わせた各種外部センサに対応
各社各種のセンサに対応しており、機構に応じたセンサ種類からのフィードバックを使用できます。