
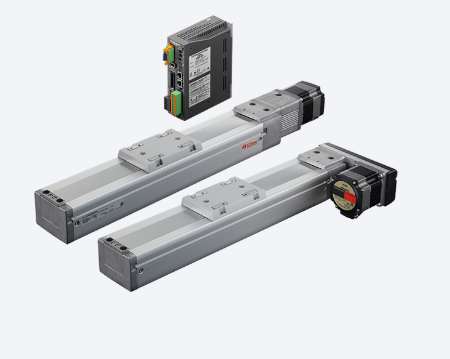
ステッピングモーター(真空タイプ)
- 参考価格
- お問い合わせください
製品・サービスに関する資料
 PDFダウンロード
PDFダウンロード
得意な分野・カテゴリー
ユーティリティ設備
物流ライン
冷凍食品
担当者からのおすすめポイント!
真空環境の品質維持に貢献
放出ガスを抑える設計
放出ガスの発生を抑えるため、モーターの表面の塗装はせず、軸受けに真空用グリースを使用しています。主な残留ガスは通常のクリーンな環境に見られる成分と同じになるため、真空チャンバー内の汚染を心配することなく使用できます。
残留ガススペクトル
温度上昇を抑えて真空圧をキープ
通常、モーター電流値の増加にともない、真空圧は高くなります。モーター温度が上昇し、主に巻線や樹脂材料からの水分の蒸発が増えるためです。真空圧を低く保つには、モーター温度を低く保つことが重要です。
お問い合わせください。
製品説明・スペック紹介
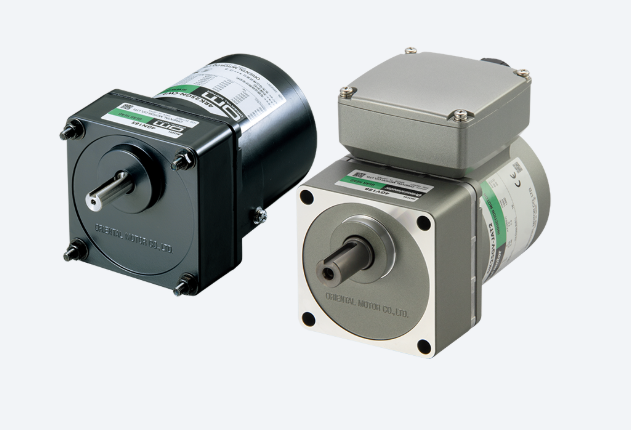
真空タイプモーターの特徴と構造
真空タイプモーターの特徴と構造
放出ガスを抑えるため、モーターケースにはアルミ、ステンレス鋼を使用し、表面は塗装していません。また、軸受けには真空用グリースを使用しています。
放出ガスは、通常のクリーンな環境に見られる成分と同じなので、真空環境を汚染する心配はありません。
ベーキング処理の温度にも耐えられるように耐熱用の巻線を使用しています。
真空タイプモーターのメリット
装置を小型化し、設計の自由度を拡大
大気中にモーターを設置する場合、回転導入機などを使用するため装置が大型になります。真空タイプは、真空環境内にモーターを設置できるため装置を小型化できます。さらにαSTEP ARシリーズなら位置確認用のセンサが不要になるためコストダウンにも貢献します。
部品点数・スペース削減01
部品点数・スペース削減01
αSTEP ARシリーズなら、エンコーダ無しで位置監視が可能
αSTEP ARシリーズは、クローズドループ制御によりモーターの情報を監視するほか、各種アラーム出力機能を搭載しています。高額の真空対応型エンコーダは不要になります。
ローター位置検出センサ
ローター位置検出センサ(レゾルバ)を搭載しモーターの情報を検出し、モーターを制御します。
真空中でさまざまな動きを実現
半導体製造装置や、電子顕微鏡をはじめとする計測機器など、さまざまな用途に採用されています。
真空チャンバー
ステージの種類
真空タイプのモーターは、回転導入機では設計が困難な、真空環境下での多軸ステージに対応します。真空中で複数軸の組み合わせが可能となり、より複雑な動きを実現させることができます。
多軸ステージにも対応
低損失のαSTEP ARシリーズは、真空中の解析、加工用途に最適です
低真空中の物資解析、高出力レーザー加工、真空成膜など、真空環境下での位置決め用途で活躍します。
取り扱い企業
- 企業名
- オリエンタルモーター株式会社同企業の情報・その他製品を見る
- 所在地
- 〒110-8536 東京都台東区東上野4丁目8番1号
- 電話
- 03-6744-0431
- Webサイト
- サービス提供エリア
-
- 関東
- 東京都
製品詳細確認・カタログ無料ダウンロード可能







関連キーワード:
モーター モータ サイクル サーボ モーター サーボ モーター 制御 サーボ 制御 サーボ モータ ロボット サーボ モータ 種類 ロボット サーボ モータ

