
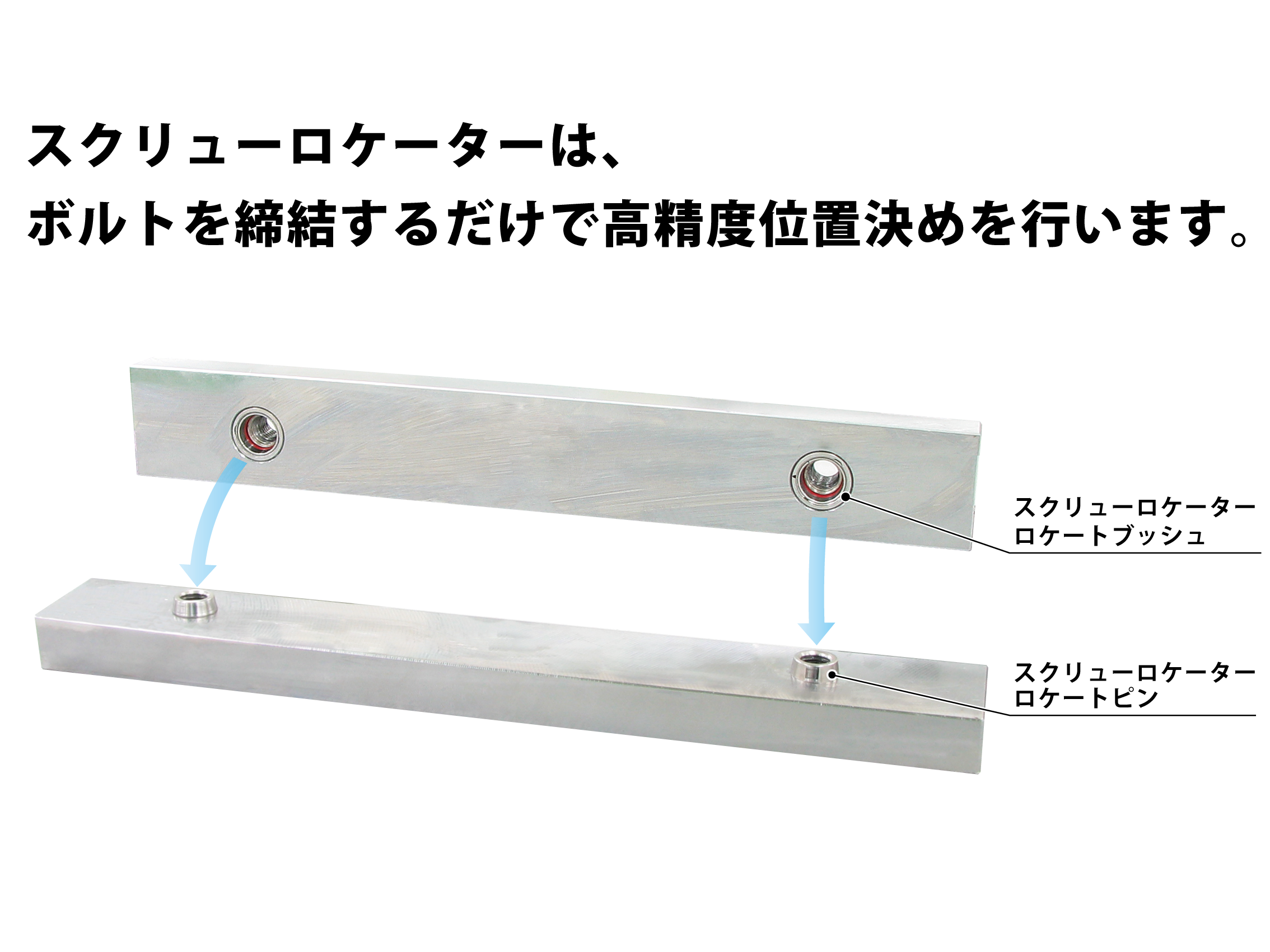
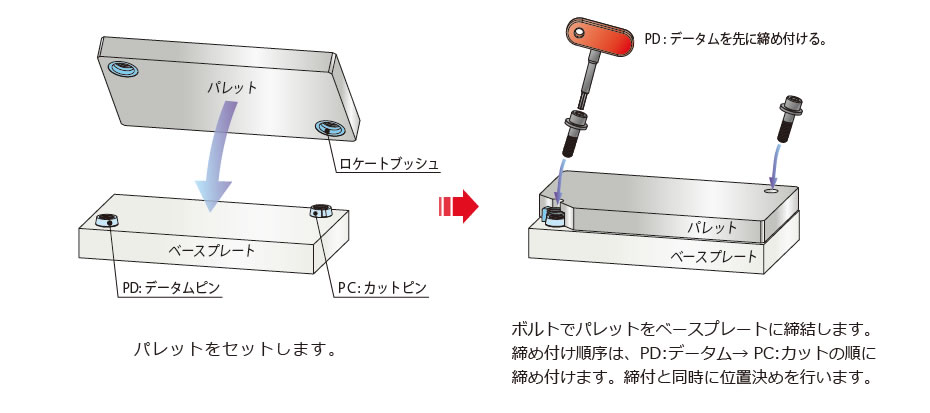
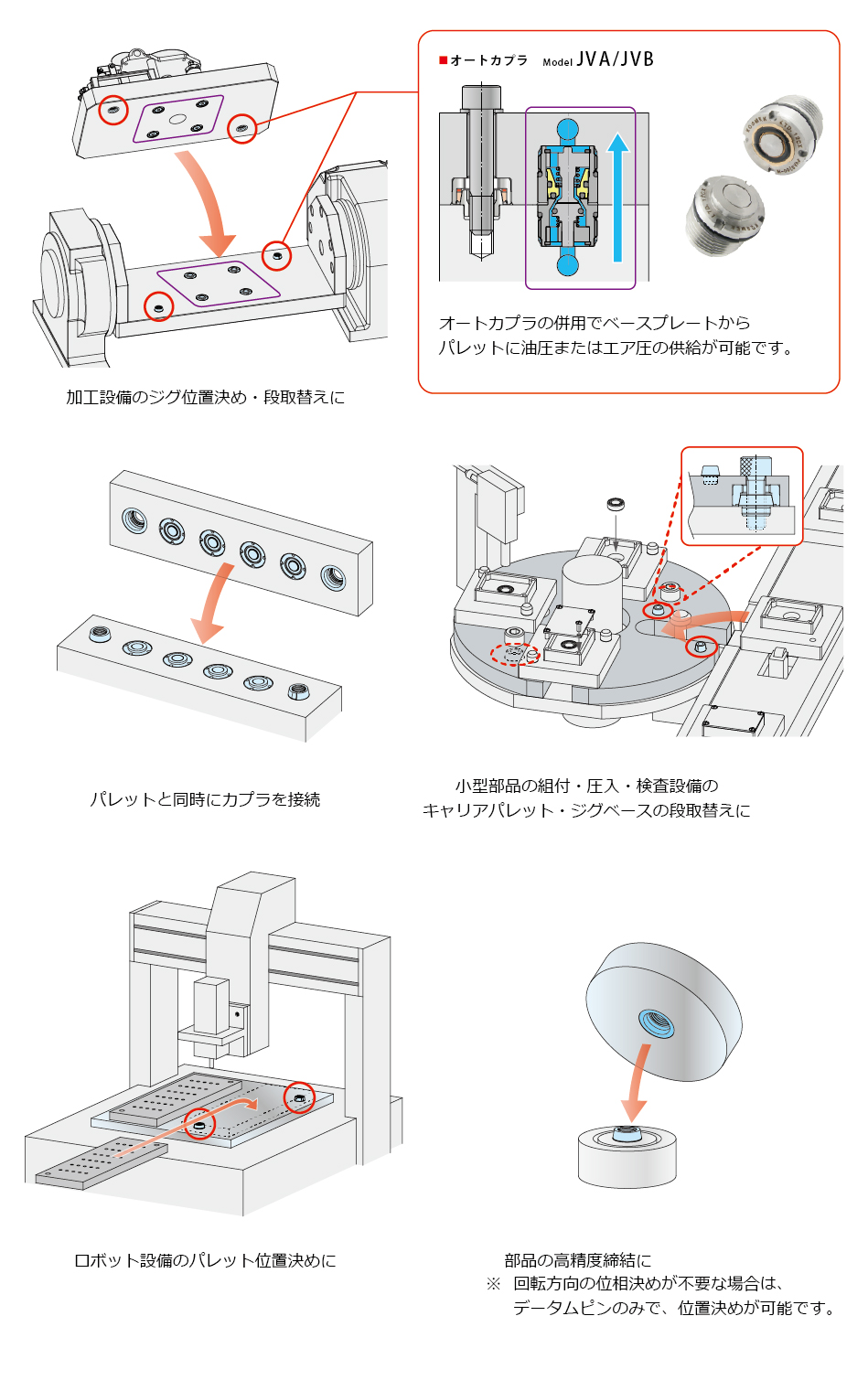
スクリューロケーター
- 参考価格
- 5,800~22,000円
製品・サービスに関する資料
 PDFダウンロード
PDFダウンロード
得意な分野・カテゴリー
製品説明・スペック紹介
|形式|VXF
パレットやプレートを手動で高精度に位置決めできます。
パレット交換時間を短縮します。
繰返し位置決め精度:0.003mm
|形式|VXE
小型・軽荷重用モデル 繰返し位置決め精度:0.005mm
取り扱い企業
- 企業名
- 株式会社コスメック同企業の情報・その他製品を見る
- 所在地
- 〒651-2241 兵庫県神戸市西区室谷2丁目1番5号
- 電話
- 078-991-5115
- FAX
- 078-991-8787
- Webサイト
- サービス提供エリア
-
- 北海道・東北
- 北海道、青森県、岩手県、宮城県、秋田県、山形県、福島県
- 関東
- 茨城県、栃木県、群馬県、埼玉県、千葉県、東京都、神奈川県
- 東海
- 岐阜県、静岡県、愛知県、三重県
- 北陸・甲信越
- 新潟県、富山県、石川県、福井県、山梨県、長野県
- 関西
- 滋賀県、京都府、大阪府、兵庫県、奈良県、和歌山県
- 中国・四国
- 鳥取県、島根県、岡山県、広島県、山口県、徳島県、香川県、愛媛県、高知県
- 九州・沖縄
- 福岡県、佐賀県、長崎県、熊本県、大分県、宮崎県、鹿児島県、沖縄県
- 海外
- 海外
製品詳細確認・カタログ無料ダウンロード可能










関連キーワード:
ロボット ハンド ロボット ハンド メーカー ロボット ハンド 種類 ロボット ハンド 吸着 ロボット の 手 ロボット アーム 小型 ロボット アーム 産業 用 ロボット アーム 水圧 式 ロボット アーム 食品 工場 ロボット

