
αSTEP AZシリーズ 多軸ドライバ
- 参考価格
- お問い合わせください
製品・サービスに関する資料
得意な分野・カテゴリー
ユーティリティ設備
物流ライン
冷凍食品
担当者からのおすすめポイント!
サポートソフトに対応
サポートソフト MEXE02でパソコンから簡単駆動
サポートソフト MEXE02を使用することにより、運転データや各種パラメータの設定・編集がおこなえるほか、ティーチング、各種状態のモニタをおこなうことができます。
お問い合わせください。
製品説明・スペック紹介
多軸ドライバの主な特徴
3種類のインターフェース
EtherCAT、MECHATROLINK-Ⅲ、SSCNETⅢ/Hに対応した製品をそれぞれご用意しています。
2軸ドライバ
2軸タイプ
3軸ドライバ
3軸タイプ
4軸ドライバ
4軸タイプ
スリムタイプ(4軸)
NEW
スリムタイプ(4軸)
ロゴマーク
スリムタイプの詳細は、最寄りの支店・営業所またはお客様ご相談センターにお問い合わせください。
省配線、コストダウン
ドライバ1台で複数軸を制御できます。
上位ネットワークに直結し、最大4軸を同時制御できる多軸ドライバ
単軸ドライバを並べるより、コンパクトで省スペースに(2軸タイプ・4軸タイプ)
ネットワーク対応の単軸ドライバを並べるより、設置スペースを省略することができます。
コンパクトで省スペース
サポートソフトに対応
サポートソフト MEXE02でパソコンから簡単駆動
サポートソフト MEXE02を使用することにより、運転データや各種パラメータの設定・編集がおこなえるほか、ティーチング、各種状態のモニタをおこなうことができます。
サポートソフトのダウンロードはこちら
さまざまな機能で、立上げからメンテナンスまでを総合サポート
立ち上げ・評価
配線チェックやテスト運転時に役立つ機能をご用意しています。
運転データの設定と保存
I/Oモニタ
ティーチング・リモート運転
調整
装置設置後のモーター動作の調整に役立つ機能をご用意しています。
波形モニタ
診断・メンテナンス
運用開始後のトラブル時の診断やメンテナンスに役立つ機能をご用意しています。
アラームモニタ
ユニット情報モニタ
ステータスモニタ
運転データ/パラメータ設定画面
運転データ/パラメータ設定画面
波形モニタ
波形モニタ
サポートソフトの機能詳細はこちら
動画でわかる用途例
パラレルリンクロボット
6軸アームロボット
タイピングロボット
円弧補間運転
さまざまなモーター・メカと組み合わせが可能
多軸ドライバと接続可能な製品は以下の通りです。
詳細は、最寄りの支店・営業所またはお客様ご相談センターにお問い合わせください。
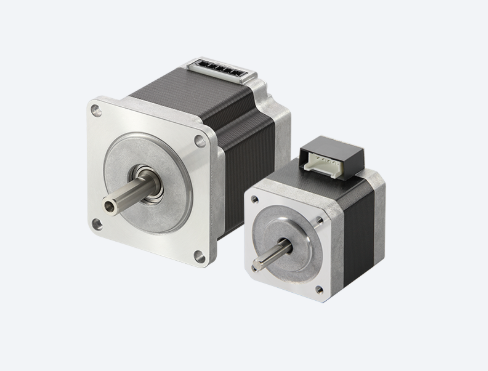
モーター(DC電源入力)
シリーズ名 製品イメージ(代表例) 概要
αSTEP
AZシリーズ AZシリーズ
多軸ドライバと、モーター・電動アクチュエータの接続には、専用の接続ケーブル(別売り)が必要です。
接続するモーター・電動アクチュエータの軸数分、必ずご用意ください。
取り扱い企業
- 企業名
- オリエンタルモーター株式会社同企業の情報・その他製品を見る
- 所在地
- 〒110-8536 東京都台東区東上野4丁目8番1号
- 電話
- 03-6744-0431
- Webサイト
- サービス提供エリア
-
- 関東
- 東京都
製品詳細確認・カタログ無料ダウンロード可能







関連キーワード:
モーター モータ サイクル サーボ モーター サーボ モーター 制御 サーボ 制御 サーボ モータ ロボット サーボ モータ 種類 ロボット サーボ モータ

