
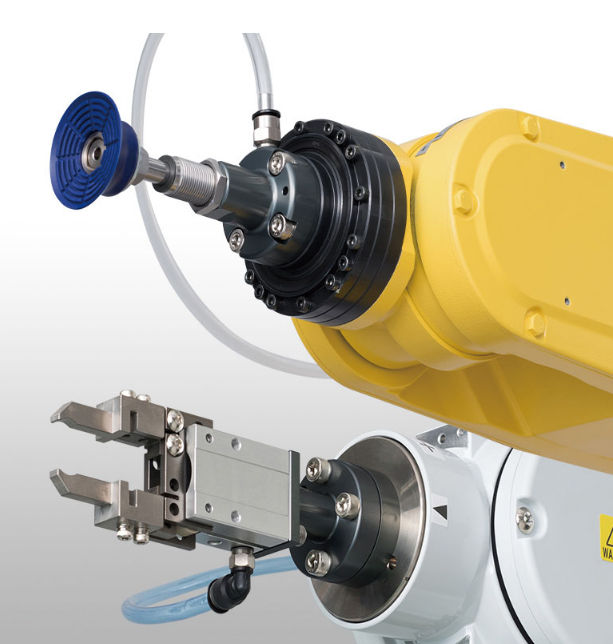
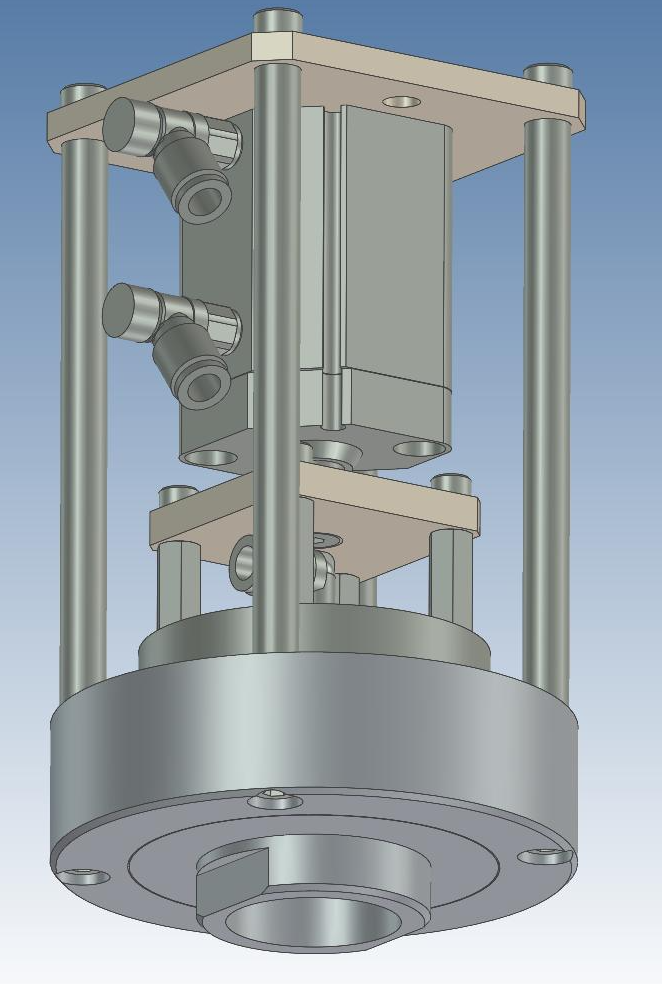
真空パッド金属検知用タイプ
- 参考価格
- 990~1,210円
製品・サービスに関する資料
 PDFダウンロード
PDFダウンロード
得意な分野・カテゴリー
惣菜・調理食品
パン・菓子
食肉・水産物
製品説明・スペック紹介
シリコーンゴムに金属粉を配合。パッドゴムの破片落下による混入が発生した際、金属検出機に反応。
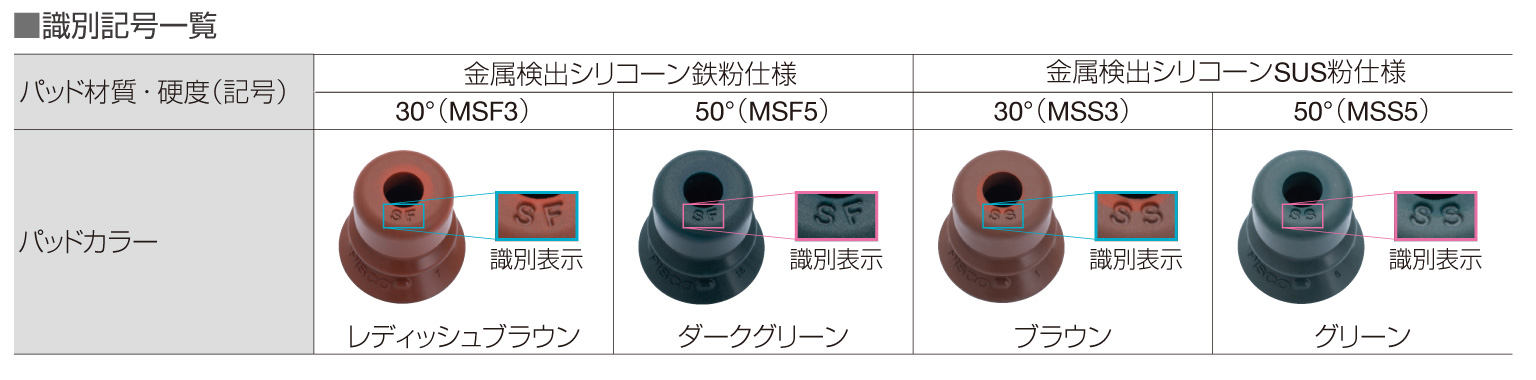
鉄粉仕様とSUS粉仕様を用意。
業界初のSUS粉仕様は、ゴムの摩擦粉が錆びにくい。
※SUS粉仕様は、検出器の設定条件や製造食品によっては検出できない場合がありますので、事前に実機にて確認してください。
鉄粉仕様は、他社と比較して反応比2倍以上。(※当社調べ)
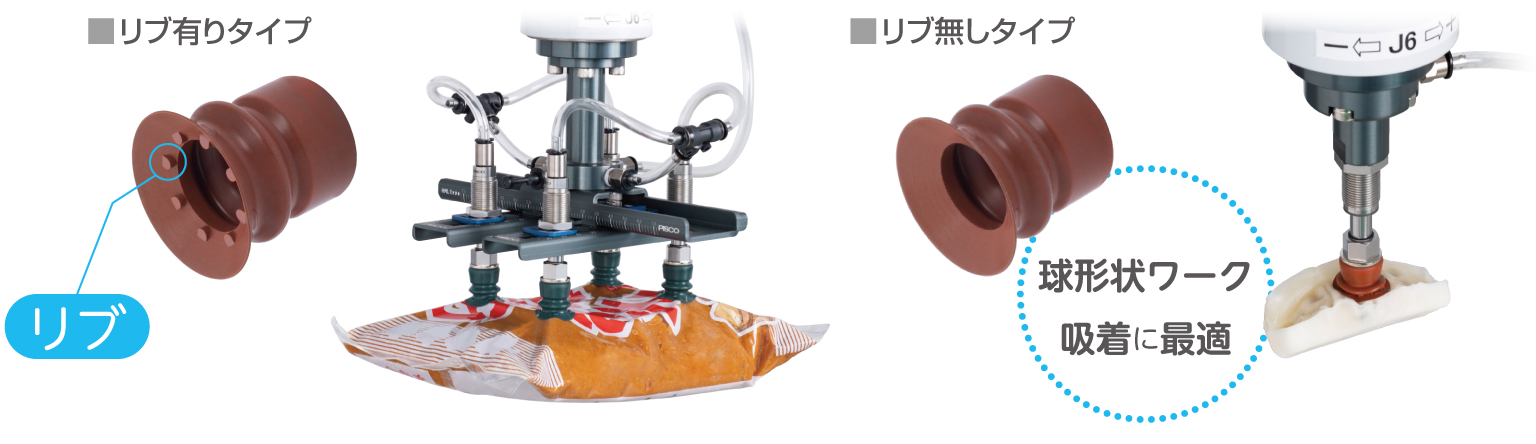
吸着面には、リブ有りタイプとリブ無しタイプを用意。
ゴムの硬度は、30°と50°の2種を用意。
ゴム硬度をカラーで識別。
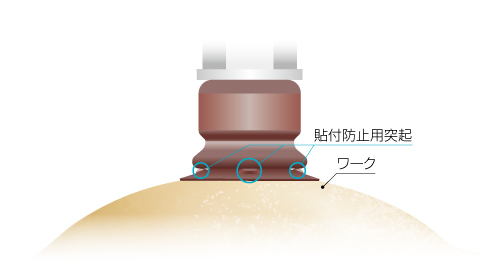
リップ部と蛇腹部の貼付きを抑制。(当社従来品との比較)
貼付防止用の突起付き。
パッド材質が一目でわかる識別記号付。
取り扱い企業
- 企業名
- 株式会社日本ピスコ同企業の情報・その他製品を見る
- 所在地
- 〒399-4511 長野県上伊那郡南箕輪村南箕輪村3884-1
- 電話
- 0265-74-8801
- Webサイト
- サービス提供エリア
-
- 北海道・東北
- 北海道、青森県、岩手県、宮城県、秋田県、山形県、福島県
- 関東
- 東京都、神奈川県、埼玉県、千葉県、茨城県、群馬県、栃木県
- 東海
- 愛知県、静岡県、岐阜県、三重県
- 北陸・甲信越
- 山梨県、新潟県、富山県、石川県、福井県、長野県
- 関西
- 大阪府、京都府、兵庫県、滋賀県、奈良県、和歌山県
- 中国・四国
- 鳥取県、島根県、岡山県、広島県、山口県、徳島県、香川県、愛媛県、高知県
- 九州・沖縄
- 福岡県、佐賀県、長崎県、熊本県、大分県、宮崎県、鹿児島県
- 海外
- 海外
製品詳細確認・カタログ無料ダウンロード可能







関連キーワード:
ロボット ハンド ロボット ハンド メーカー ロボット ハンド 種類 ロボット ハンド 吸着 ロボット の 手 ロボット アーム 小型 ロボット アーム 産業 用 ロボット アーム 水圧 式 ロボット アーム 食品 工場 ロボット

