
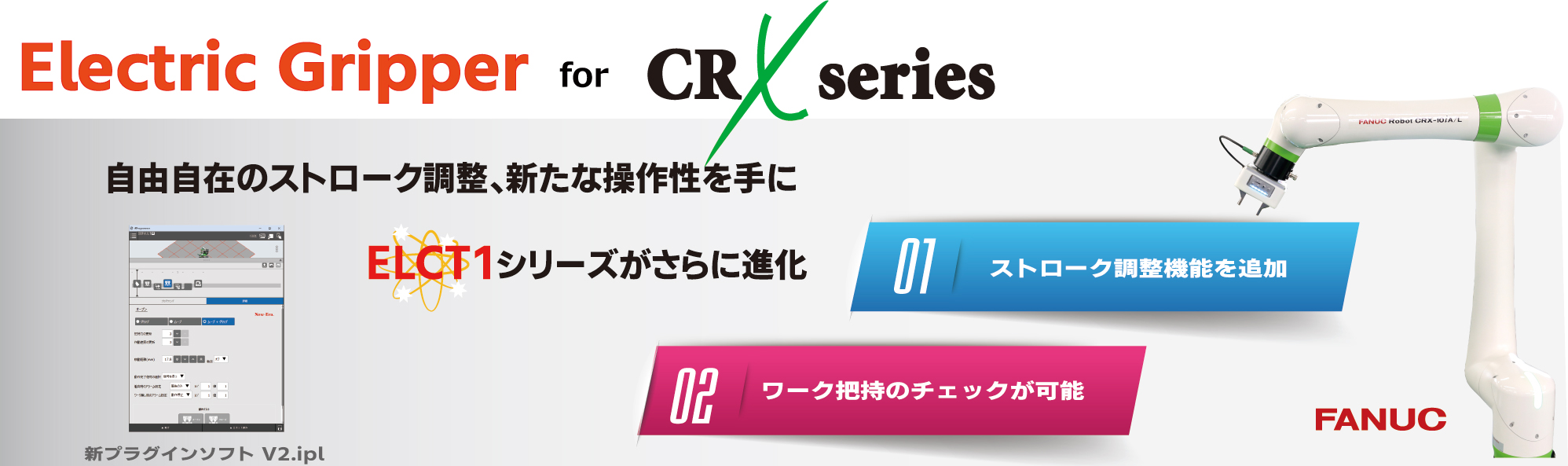
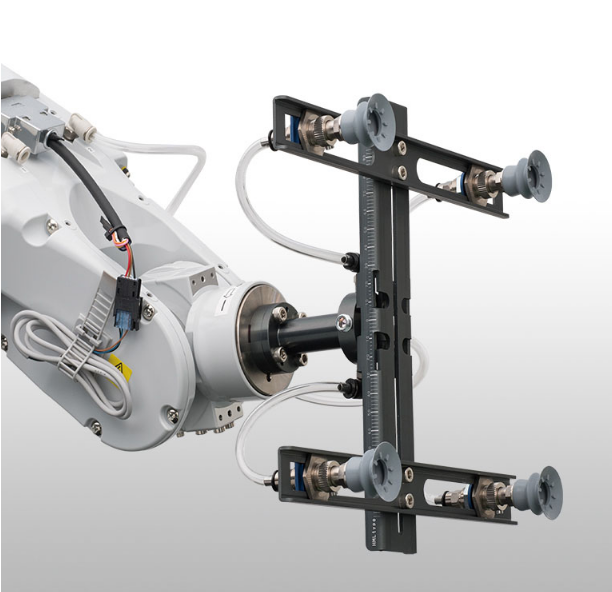
FANUC CRXプラグイン対応電動ハンド
- 参考価格
- 250,000円
製品・サービスに関する資料
 PDFダウンロード
PDFダウンロード
得意な分野・カテゴリー
物流ライン
ユーティリティ設備
製品説明・スペック紹介
高機能・低コスト・使いやすいプログラムを実現。
・コントローラ内蔵
・把持力・開閉速度を3段階で設定が可能
・ストローク調整機能付き
・ソフト把持機能付き
・落下防止機構付き
・動作状態が解る、LEDインジケータランプ付き
【スペック】
最大把持力:100N 3段階設定(60/80/100N)
開閉ストローク:20mm(片側10mm)
ストローク調整:2mm~20mmの間で設定可能
把持速度:3段階設定(1.8s/1.2s/0.9s)
落下防止機能:設定把持力80%
本体質量:1.35kg(-PIT 1.49kg)
通信インターフェイス:シリアル通信(RS-485)、デジタルI/O 2点
繰返し把持精度:±0.01mm
取り扱い企業
- 企業名
- 株式会社ニューエラー同企業の情報・その他製品を見る
- 所在地
- 〒544-6 大阪府大阪市生野区中川東1-7-21
- 電話
- 06-6754-8581
- Webサイト
- サービス提供エリア
-
- 北海道・東北
- 北海道、青森県、岩手県、宮城県、秋田県、山形県、福島県
- 関東
- 茨城県、栃木県、群馬県、埼玉県、千葉県、東京都、神奈川県
- 東海
- 岐阜県、静岡県、愛知県、三重県
- 北陸・甲信越
- 新潟県、富山県、石川県、福井県、山梨県、長野県
- 関西
- 滋賀県、京都府、大阪府、兵庫県、奈良県、和歌山県
- 中国・四国
- 鳥取県、島根県、岡山県、広島県、山口県、徳島県、香川県、愛媛県、高知県
- 九州・沖縄
- 福岡県、佐賀県、長崎県、熊本県、大分県、宮崎県、鹿児島県、沖縄県
- 海外
- 海外
製品詳細確認・カタログ無料ダウンロード可能








解決できる課題
関連キーワード:
ロボット ハンド ロボット ハンド メーカー ロボット ハンド 種類 ロボット ハンド 吸着 ロボット の 手 ロボット アーム 小型 ロボット アーム 産業 用 ロボット アーム 水圧 式 ロボット アーム 食品 工場 ロボット

