
遠隔攪拌システム DRRアプリケーション
DRRアプリケーション(Dual.Rimoto.Robot.Application)とは掻き混ぜる、攪拌といった作業を遠隔で行えるアプリケーションです。
危険が伴う、過酷な環境下の中での作業からの解放を実現する、人とこれからの産業を担う次世代のアプリケーションです。

AMR+協働ロボット
AMRと協働ロボットを組み合わせることにより1台のロボットでピッキングから搬送を自動にて可能にします。
AMRと協働ロボットを組み合わせることにより1台のロボットでピッキングから搬送を自動にて可能にします。
ロボットハンドの設計はもちろん、ロボットのシステムの構築も致します。
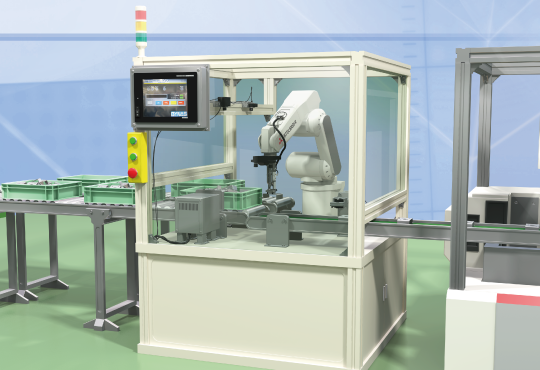
3Dピッキング、ラベル貼付けロボットアプリケーション
3次元カメラ搭載 バラ積み部品ロボットピッキング装置
コンテナからバラ積み部品の取り出しを可能にした「バラ積み部品ロボットピッキング装置」を開発しました。
3次元カメラを搭載し、1ワーク最速値:3秒でバラ積み部品の取り出しが可能です。
プレス部品のコンテナからの取り出し、樹脂部品のトレイへの整列挿入、バラ積みされた容器の取り出しなど、人手に頼っていた工程の省人化を実現します。
不定形ワーク用 ピッキングラベラー装置
不定形、不安定ワークの中心を検出し、ラベルを貼り付ける「ピッキングラベラー装置」を開発いたしました。
1つ1つ形状の異なる食品、形状が不安定なポリパック、貼り付け面が柔らかい食品用容器へのラベル貼り付けが
最速値:1ワーク1秒で可能な装置です。
人手に頼っていた工程を、「ピッキングラベラー装置」で省人化を実現できます。

高速ピッキング ロボットアプリケーション
高速ピッキングロボットアプリケーション
従来の生産現場では、大量に流れてくるワークを大勢の作業者がコンベアの両側に並んで処理するか、専用機で処理するためにワークを位置決めする装置が必要でした。
高速ピッキングロボットアプリケーションは、位置決めされていないワークを2Dビジョンカメラで認識し高速ロボットが追跡し、ピッキングします。(これをビジョントラッキングと言います。)
高速ピッキング ロボットアプリケーション
高速ピッキングロボットアプリケーションを採用されたお客様の要求事項は、次のようなものでした。
1.1分間に60個以上のワークを処理したい
2.ワークの大きさが不定形で、個体差があり、自動化が難しい
3.ワークの品種が多く、段取り替えが多い
4.ワークが壊れ易く、人手で処理するしか方法がない
5.周辺装置も含めて自動化することができるシステムインテグレータを探している
当社は、数多くの実績で培った5つの技術力で、お客様の課題にソリューションを提供します。
1.パラレルリンクロボット
”ロボットメーカーにとらわれないベストソリューションをご提案します“
高速で動作するパラレルリンクロボットの特性を熟知し、制御技術に長じています。
お客様の環境、工程、仕様に応じて、最適なロボットを選定します。
2.高速でも高精度 エンドエフェクタ
1分間に60個以上のワークをピッキングし、正確に置くことができるエンドエフェクタを設計、製作することができます。
とくに傷がつき易いワークや、壊れ易いワークをピッキングするエンドエフェクタの実績も豊富に持っています。
3.センシング技術力を使う理由
大量のワークがコンベア上を不均一の向きで流れてきますので、 2Dビジョンセンサで、ワークの輪郭を認識し、中心を狙って、ピッキングします。
当社は、個体差のあるワーク(特に一次食品、樹脂部品)を2Dビジョンセンサで認識し、高速ピッキングした実績が多数ございます。
不定形なワークにラベルを貼るピッキングラベラー ロボットアプリケーションは、高度なセンシング技術を基に確立したアプリケーションです。
従来のラベラーではラベルを貼り付けることができなかった不定形かつ柔らかいワークに対して、向きと中心を合わせてラベルを貼ることが可能です。
4.周辺装置もBYNASクオリティ
高速ピッキングロボットアプリケーションを実現するための周辺装置もBYNASクオリティを結集した自社設計の装置です。
前後工程も含めたシステム全体をご提供いたします。
5.業種別システムコーディネート力
高速ピッキングロボットアプリケーションを納入した業種は、自動車、電気・電子、食品、薬品と多岐に渡っています。
それぞれの業種における安全基準や設備基準に対応可能です。
電気・電子のクリーンルーム対応、食品の水洗い対応、製薬のバリデーションにも対応しています。

DX技術エンジニア育成
DX技術・FA技術・ロボット・
PLCエンジニアの育成は
バイナスにおまかせ
各種メーカーのロボット・PLCでも対 技能研修40年以上 教材・研修・日時カスタマイズが可能
エンジニア育成、トレーニングをお考えの企業様へ。
バイナスが経営層向けトレーニング~新人社員向け研修・
トレーニングまで、一気通貫でサポートさせて頂きます。
バイナスの研修・トレーニングなら
COURSE
種類豊富な研修・トレーニングから選べる
「学びたい」がきっと見つかる! 技術者向けはもちろん、「知識を深めたい」という経営者様のお役に立てる研修もあります。
LEARNING
最新設備・技術が学べる
業界の先を行く技術が身に付く!充実した最新設備で、技術者育成のプロ講師から最先端のノウハウが学べます。
MATERIALS
ここだけのオリジナル教材
技術者育成40年以上のバイナスが作る、自社完全オリジナル教材!学校教育の場でも使われる“わかりやすさ”が自慢です。
CUSTOMIZED
企業様専用にカスタマイズ
「自社専用にこんな研修がしたい」というリクエストにもお応えします!教材・研修ともに自社監修だから、細かなカスタマイズが可能です。
TRAINING
実機研修で即戦力を育成
実際に操作しながら学べるから、現場ですぐに使えるスキルが身に付きます!DX技術・FA技術など、最新技術の育成もご相談ください。

AMRテストフィールドセンター
AMRアプリケーションを
現在ご検討中のお客様へ
現在ご検討中、これからご検討予定のお客様についても内容の程度に関わらず、お気軽にBYNASへご相談ください。
センターにお越しいただき各メーカーのAMRをご見学いただけます。
また、過去の実績AMRアプリケーションのデータベースから、“お客様の搬送工程に合った最適なAMRアプリケーション”をご提案させていただきます。
バッテリー消費&タクトシミュレーションテスト
AMRの運用で重要なファクターにバッテリー消費があります。
バッテリー消費と充電時間を考慮しないと実運用で想定通りの稼働ができなくなります。
バッテリー消費シミュレーションを行うことで、稼働時間内での充電のタイミングを想定することができます。
また、全体の稼働時間内で、充電も含めたタクトを検証することができます。
停止精度検証テスト
停止精度が要求される現場では、実際に走行させて停止精度を確認しないと想定通りに運用できないことがあります。
AMRテストフィールドセンターでは、模擬したコースを作り、実運用を想定した停止精度の有効性を確認することができます。
バイナス製の「停止精度補正パッケージ」もご用意しております。
既存のAMRにこのパッケージを追加することで停止精度を±5mm以下まで高めることができます。
床環境別走行能力テスト
AMRは走行する床の状態によっては、想定通りの走行ができないこともあります。
あらかじめ想定できる床環境を再現して走行テストすることにより、現場に導入した後でのトラブルを回避することができます。
複数台運用シミュレーションテスト
AMRを複数台運用する場合には、運行管理システムからの指示が必要です。
運行管理状況の確認、すれ違い動作の確認や、複数台がフレキシブルに動いた全体のタクト確認が可能です。
屋外走行テスト(一部AMRのみ)
AMRには工場の屋内だけでなく、屋外を走行できるタイプもあります。
屋外への荷物の搬送が必要な場合に、実際に工場内と工場外の走行テストが可能です。
境界の段差や床面の材質違いに対応できるかをテストできます。

