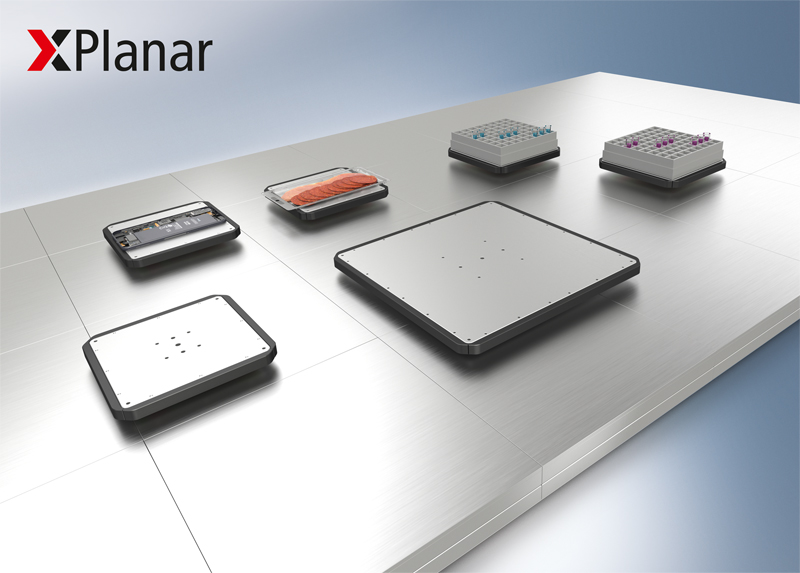
浮遊型リニア搬送システムXPlanar
可動子が磁力により浮遊して6自由度の自在な制御が行えます。完全浮上動作のためコンタミレスかつ自在な軌道上を移動することが可能です。多品種少量生産を実現できる次世代型の搬送システムです。
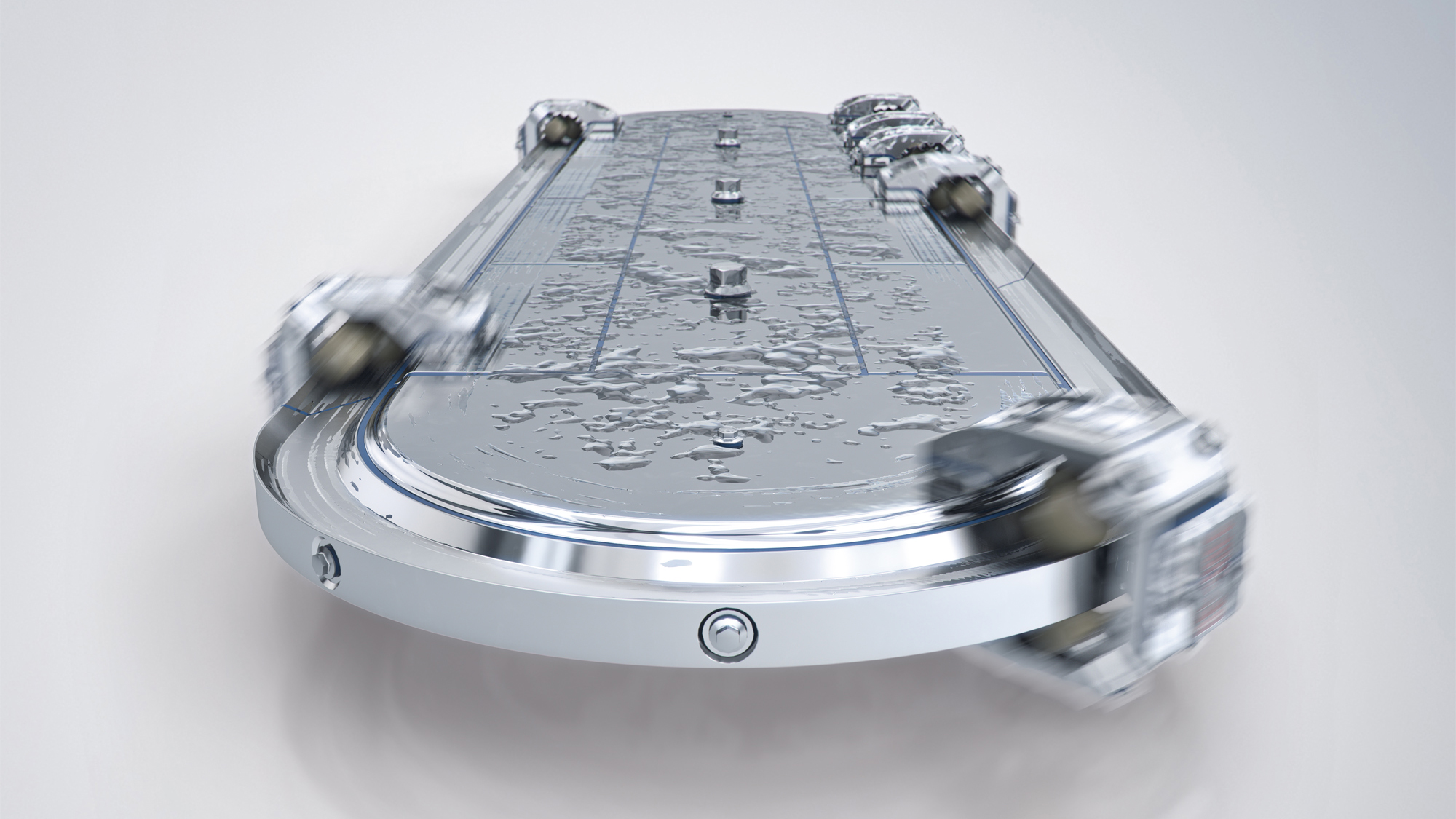
防水型高速リニア搬送システムXTS Hygienic
各可動子が磁力により個別に高速・高精度に移動することができます。タクトタイムの向上ならびに従来のメカ機構では実現できないような制御動作も行うことが可能です。
「XTS」はコイルが敷き詰められた"モーターモジュール"と、磁石が取り付けられた"可動子"ならびに"ガイドレール"から構成され、磁力により可動子がレール上を移動することができるリニア搬送システムです。またコントローラには"ベッコフ製産業用PC"にWindows OS上でリアルタイム動作可能な"TwinCAT"がインストールされており、各モーターモジュールに対して"EtherCAT"の通信を用いて、サイクリックに動作指令・位置情報のフィードバックを行っています。また新たにIP69K規格に準拠した「XTS Hygienic」が加わり、防水性能の向上ならびに薬液洗浄が可能になりました。

PC制御とソフトウェアPLC「TwinCAT3」
Windows OSを搭載したベッコフ製産業用PCに、ソフトウェアPLC"TwinCAT"を搭載し、Windows OSでありながら、高速演算・高精度化を実現できるコントローラをご提供いたします。PLC、モーション、Vision、AI、HMIなどあらゆる機能を1台のコントローラに集約し動作させることができます。また開発言語はPLCのほかC++でも行うことができ、開発環境は無償で弊社Webサイトからダウンロードしてご使用いただけます。

非接触給電型リニア搬送システムNCT(No Cable Technology)
インテリジェントな⾼速リニア搬送システムXTSに⾰新的なノーケーブルテクノロジ(NCT=No Cable Technology)を採⽤することにより、マシンの柔軟性をさらに⾶躍しました。この技術は、⾮接触給電と同期したリアルタイムデータ通信によって実現、各可動⼦を移動式の処理ステーションに拡張できます。

TwinCAT Vision
リアルタイム画像処理をする実現するOpenCVベースのビジョンソフトウェア
GigE vision対応カメラから画像データをリアルタイムで取得し画像処理タスクをPLCやモーション制御等とリアルタイムに同期可能です。OpenCVベースのビジョンライブラリで計測、識別、パターン認識などのアプリケーションで利用可能です。開発環境はVisualStudioに統合されておりカメラの設定やキャリブレーション等も同環境上ですべて完結して実行可能です。設定変更内容も即時レビューが可能なのに加え変数モニタリングやブレークポイントの設定などPLCがサポートしている様々なデバッグオプションも利用可能なので従来の独立したシステム開発と比較して開発工数の削減が可能です。

