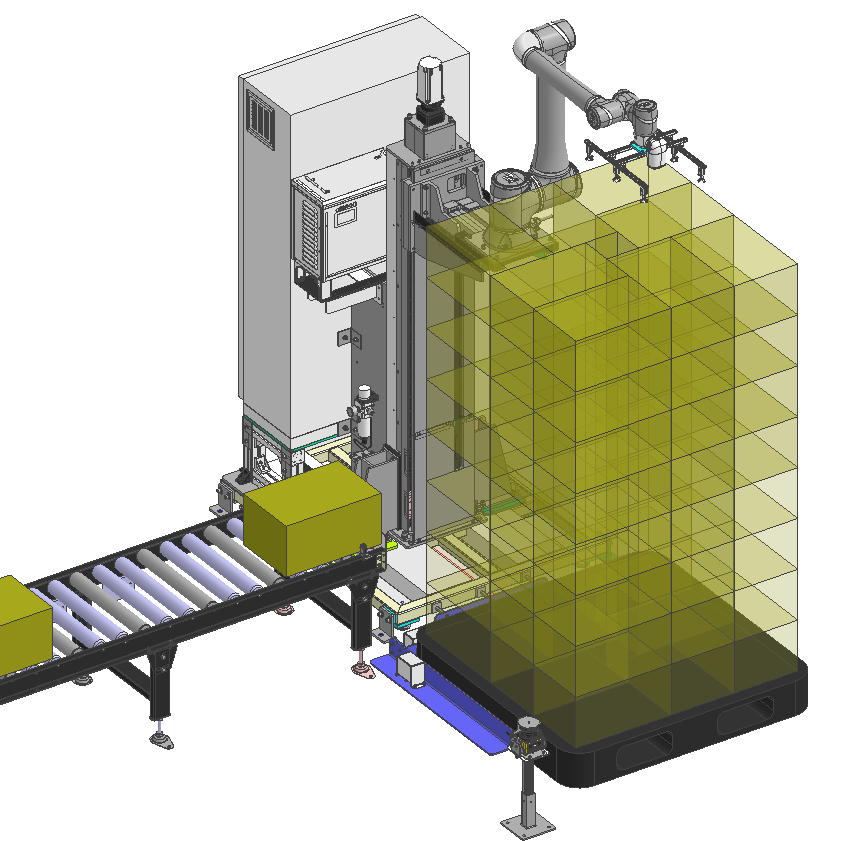
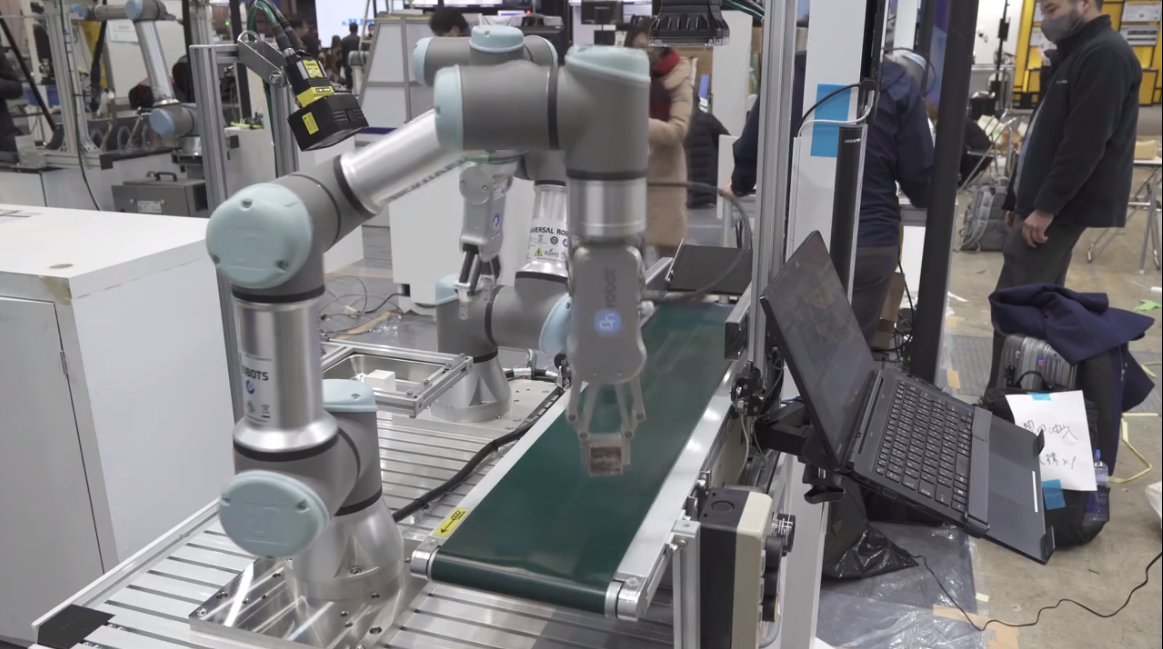
ELITE ROBOT ECシリーズ
関節部の性能が高く、可搬重量当たりの自重が軽いため、高い安全性・信頼性を保ちながら高速な動作が可能です。
ELITE ROBOTの協働ロボットは、制御技術、サーボ技術、エンコーダ技術、機械技術、構造技術、工業デザイン技術を統合した製品です。
視覚認識、力覚、自律障害物回避、自律経路計画、自律エネルギー評価、AR対話、APP教示機能を備え、より安全でスマートです。
製品は3C組立、物流仕分け、医療、教育、新型小売などの用途に広く使用されています。
ISO 10218取得
EC63 EC66 EC612 EC616
軸数 6 6 6 6
本体重量 13kg 17.5kg 33.5kg 32.5kg
可搬重量 3kg 6kg 12kg 16kg
リーチ 624mm 914mm 1304mm 954mm
繰り返し精度±0.03mm
最大速度 2.0m / s 2.8m / s 3.2m / s 2.8m / s
IP等級 IP54 IP54 IP54 IP54
作業温度 0~50℃ 0~50℃ 0~50℃ 0~50℃
作業湿度 5%~95%(結露無) 5%~95%(結露無) 5%~95%(結露無) 5%~95%(結露無)
消費電力 約150W 約250W 約500W 約500W
取付角度 任意の平面角度 任意の平面角度 任意の平面角度 任意の平面角度
電圧 48V 48V 48V 48V
ツールI/O 2×DI, 2×DO, 1×AI, 1×AO 2×DI, 2×DO, 1×AI, 1×AO 2×DI, 2×DO, 1×AI, 1×AO 2×DI, 2×DO, 1×AI, 1×AO
コード長さ 5.5m 5.5m 5.5m 5.5m
コントローラー
EC63 EC66 EC612 EC616
サイズ 505×448×245mm 505×448×245mm 505×448×245mm 505×448×245mm
本体重量 15kg 15kg 17kg 17kg
IP等級 IP44 IP44 IP44 IP44
通信I/F 16×DI, 16×DO, 2×AI, 4×AO 16×DI, 16×DO, 2×AI, 4×AO 16×DI, 16×DO, 2×AI, 4×AO 16×DI, 16×DO, 2×AI, 4×AO
電源 100-240VAC 100-240VAC 100-240VAC 100-240VAC
作業温度 0~50℃ 0~50℃ 0~50℃ 0~50℃
作業湿度 5%~95%(結露無) 5%~95%(結露無) 5%~95%(結露無) 5%~95%(結露無)
ティーチングペンダント
ECシリーズのティーチングペンダントのスペックは共通です
EC63 EC66 EC612 EC616
サイズ 12.1inch 12.1inch 12.1inch 12.1inch
ディスプレイ
解像度 1280 × 800 1280 × 800 1280 × 800 1280 × 800
本体重量 1.8kg 1.8kg 1.8kg 1.8kg
コード長さ 5.5m 5.5m 5.5m 5.5m
IP等級 IP65 IP65 IP65 IP65
作業温度 0~50℃ 0~50℃ 0~50℃ 0~50℃
作業湿度 5%~95%(結露無) 5%~95%(結露無) 5%~95%(結露無) 5%~95%(結露無)
解決できる課題
- 経費削減
- 人手不足解決
- コスト削減
- 自動化
- 腰痛対策
- 物流オートメーション

 PDFダウンロード
PDFダウンロード