


SMARTSHIFT ロボットシステム SSR
- 参考価格
- 56,000円
製品・サービスに関する資料
 PDFダウンロード
PDFダウンロード
得意な分野・カテゴリー
パン・菓子
惣菜・調理食品
物流ライン
製品説明・スペック紹介
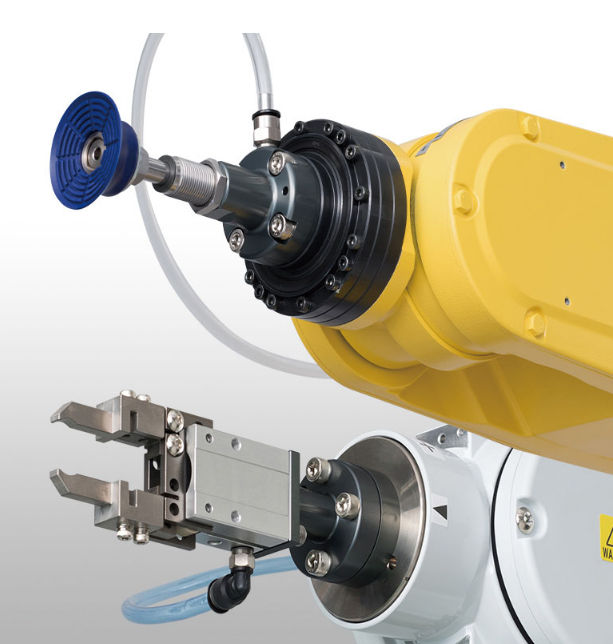
SMARTSHIFTスマートシフト ロボットシステムはツール交換に電力やエアは不要
ロボットアームの直進運動を利用した簡単なツールチェンジが可能です。
主に協働ロボットや小型産業用ロボットでご利用いただけます。
コンパクトで軽量、ロボットによる素早いツール交換だけでなく、人による手動交換もワンタッチで行えます。
さまざまな作業でロボットの有効活用ができ、ロボットの稼働率向上と導入効果を引き出します。
[特長]
ツール交換時の駆動源にエア・電気不要!
本体はシンプルなメカ式機構で、ツール交換時の駆動源としてエアや電気は使用しません。
ツール交換に高精度なティーチング不要!
ロボットによる自動交換はロボットアームの直進運動のみで行います。
交換時の高精度なティーチングや煩わしい制御は不要です。
自動交換手動交換どちらも対応!
ボタンを押しながらスライドして挿入するだけの手動交換も可能です。
エア・電気パススルー内蔵あらゆるツールに対応!
空気インターフェースを標準装備し、電気インターフェースも備えたタイプもご用意。
軽量・コンパクト!
本体サイズは直径63mmとコンパクト。総重量約400gと軽量でロボットの可搬重量への影響も少ないです。
取り扱い企業
- 企業名
- 株式会社 イマオコーポレーション同企業の情報・その他製品を見る
- 所在地
- 〒501-3954 岐阜県関市千疋2002
- 電話
- 0575-28-5807
- Webサイト
- サービス提供エリア
-
- 北海道・東北
- 北海道、青森県、岩手県、宮城県、秋田県、山形県、福島県
- 関東
- 東京都、神奈川県、埼玉県、千葉県、茨城県、群馬県、栃木県
- 東海
- 愛知県、静岡県、岐阜県、三重県
- 北陸・甲信越
- 山梨県、新潟県、富山県、石川県、福井県、長野県
- 関西
- 大阪府、京都府、兵庫県、滋賀県、奈良県、和歌山県
- 中国・四国
- 鳥取県、島根県、岡山県、広島県、山口県、徳島県、香川県、愛媛県、高知県
- 九州・沖縄
- 福岡県、佐賀県、長崎県、熊本県、大分県、宮崎県、鹿児島県、沖縄県
製品詳細確認・カタログ無料ダウンロード可能








関連キーワード:
ロボット ハンド ロボット ハンド メーカー ロボット ハンド 種類 ロボット ハンド 吸着 ロボット の 手 ロボット アーム 小型 ロボット アーム 産業 用 ロボット アーム 水圧 式 ロボット アーム 食品 工場 ロボット

