エアスイングクランプ
- 参考価格
- 12,980~20,000円
製品・サービスに関する資料
 PDFダウンロード
PDFダウンロード
処理能力
(把持回数/分・対応サイクル)
把持回数/分は要メーカー確認
対応サイクルは要メーカー確認
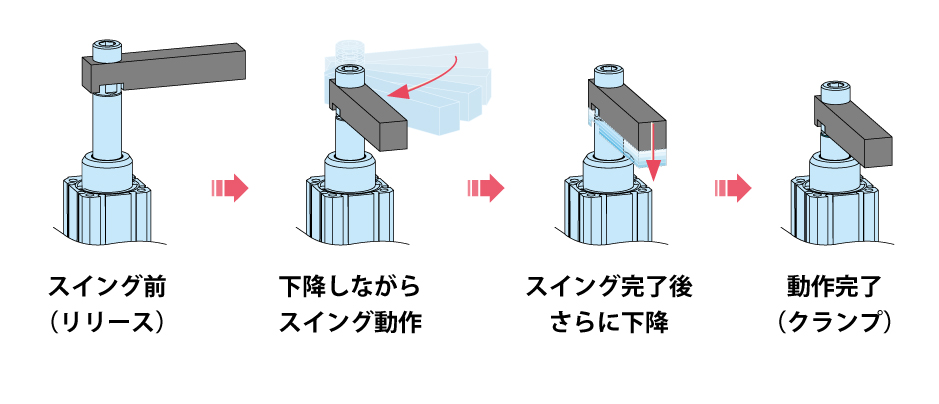
下降しながら90°スイング動作を行い、スイング完了後さらに下降してクランプする仕様
スイング角度精度は90°±3°
仕上がりの安定性
(把持安定性・落下防止の工夫)
ロックスイング完了位置繰返し精度は±0.5°
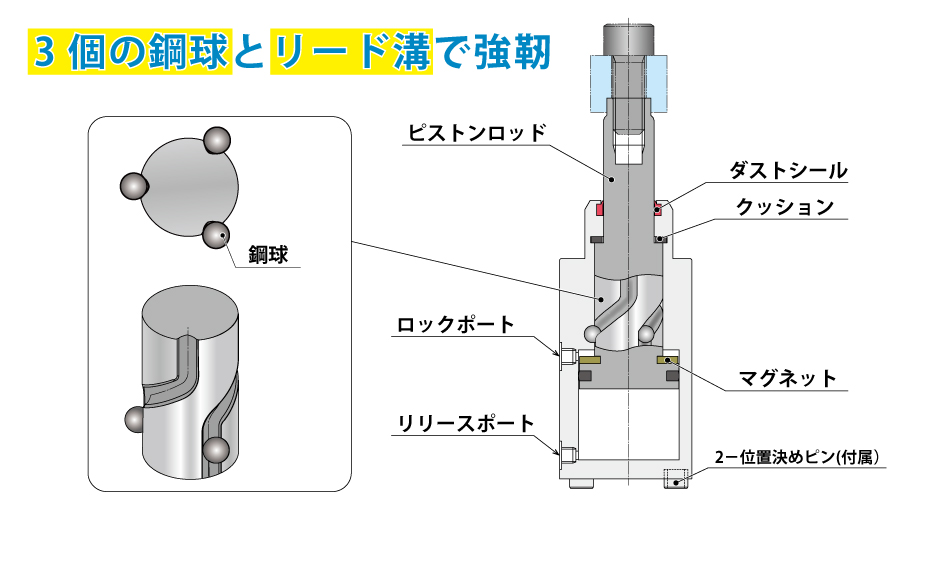
3個の鋼球とゴシックアーチ形状のリード溝による強靭なスイング機構
ハイスピードと高寿命を実現する仕様
社内動作テスト200万回実施済み
高剛性・高寿命・高精度を特徴として掲載
クランプ力はレバー長さ、供給エア圧、型式により変化する仕様
対応条件
(可搬重量・把持サイズ/対象物形状対応範囲)
シリンダ内径はφ20mm、φ32mm、φ40mm
ロック時スイング方向は時計廻り、反時計廻りを選択可能
標準はロックストローク10mm
Q20はロングストロークタイプでロックストローク20mm
最高使用圧力は1.0MPa
最低作動圧力は0.1MPa
耐圧は1.5MPa
使用温度は0~70℃
使用流体はドライエア
対象物形状対応範囲の詳細は要メーカー確認
設置条件
(取付規格/電源・エア/ロボット互換性)
オートスイッチによりクランプのロック動作、リリース動作を検出可能
2線式、3線式のオートスイッチ、高精度シリンダセンサの適用形式を掲載
オートスイッチ、高精度シリンダセンサの保護構造はIP67
電源、ロボット互換性、取付規格の詳細は要メーカー確認
切替・段取り
(爪交換・ツールチェンジのしやすさ)
ロック時スイング方向を時計廻り、反時計廻りから選択可能
標準タイプとロングストロークタイプを選択可能
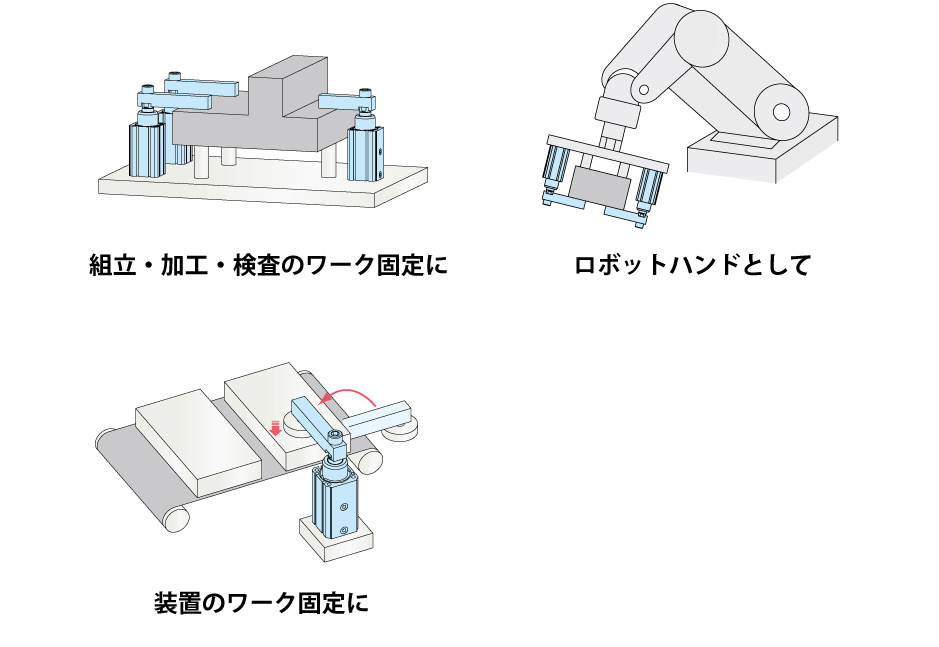
装置のワーク固定、組立・加工・検査のワーク固定、ロボットハンドとしての使用例を掲載
レバー形状によってはスイング動作途中で停止するおそれがあるため、レバー設計時の考慮が必要
爪交換、ツールチェンジのしやすさに関する詳細は要メーカー確認
清掃・安全・メンテナンス
(分解清掃性/衛生対応/保守体制)
クーラント環境で使用可能
ダストシールを備えた構造
オートスイッチ、高精度シリンダセンサは装着する位置や向きによってクランプから飛び出す場合あり
交流強磁界環境下でJEP/JESシリーズは使用不可
使用不可範囲で使用すると、変形、かじり、エア漏れ等の原因になると記載
分解清掃性、衛生対応、保守体制の詳細は要メーカー確認
特徴
エアスイングクランプ
世界最小クラスの小型スイングクランプとして掲載
3個の鋼球とゴシックアーチ形状のリード溝による強靭なスイング機構
ハイスピード、高寿命、高剛性、高精度を特徴として掲載
社内動作テスト200万回実施済み
ロックスイング完了位置繰返し精度±0.5°
スイング角度精度90°±3°
クーラント環境で使用可能
シリンダ内径φ20mm、φ32mm、φ40mmの型式を掲載
標準ロックストローク10mm、ロングストロークタイプ20mmを選択可能
得意な分野・カテゴリー
物流ライン
パン・菓子
惣菜・調理食品
製品説明・スペック紹介
|形式|WHC
ゴシックアーチ形状の3本リード溝による強靭な機構を搭載した
高寿命・高速・高精度の小型エアスイングクランプ(ロータリークランプシリンダ)です。
オートスイッチの取付が可能で様々な場所でご使用いただけます。
ダストシールで製品内部への異物侵入を防止しています。
取り扱い企業
- 企業名
- 株式会社コスメック同企業の情報・その他製品を見る
- 所在地
- 〒651-2241 兵庫県神戸市西区室谷2丁目1番5号
- 電話
- 078-991-5115
- FAX
- 078-991-8787
- Webサイト
- サービス提供エリア
-
- 北海道・東北
- 北海道、青森県、岩手県、宮城県、秋田県、山形県、福島県
- 関東
- 茨城県、栃木県、群馬県、埼玉県、千葉県、東京都、神奈川県
- 東海
- 岐阜県、静岡県、愛知県、三重県
- 北陸・甲信越
- 新潟県、富山県、石川県、福井県、山梨県、長野県
- 関西
- 滋賀県、京都府、大阪府、兵庫県、奈良県、和歌山県
- 中国・四国
- 鳥取県、島根県、岡山県、広島県、山口県、徳島県、香川県、愛媛県、高知県
- 九州・沖縄
- 福岡県、佐賀県、長崎県、熊本県、大分県、宮崎県、鹿児島県、沖縄県
- 海外
- 海外
製品詳細確認・カタログ無料ダウンロード可能









関連キーワード:
ロボット ハンド ロボット ハンド メーカー ロボット ハンド 種類 ロボット ハンド 吸着 ロボット の 手 ロボット アーム 小型 ロボット アーム 産業 用 ロボット アーム 水圧 式 ロボット アーム 食品 工場 ロボット