冷凍食品移載システム
上流から流れてくる冷凍食品をロボットハンドで受け取り、並行して流れる紙のトレイに移載する。
タクト:70個/min
標準構成:ロボット周辺(ロボット/ステンレスフレーム/チャック式ハンド等)、ビジョンシステム、コンベア、制御盤
食品パウチ移載システム
①上流から流れてくる食品用のパウチをロボットハンドで下流に移載する。
②パウチを搭載している金属のトレイを回収する。
標準構成:ロボット周辺2種(ロボット/フレーム/ハンド等)、安全柵、ビジョンシステム、トレイストッカー、制御盤
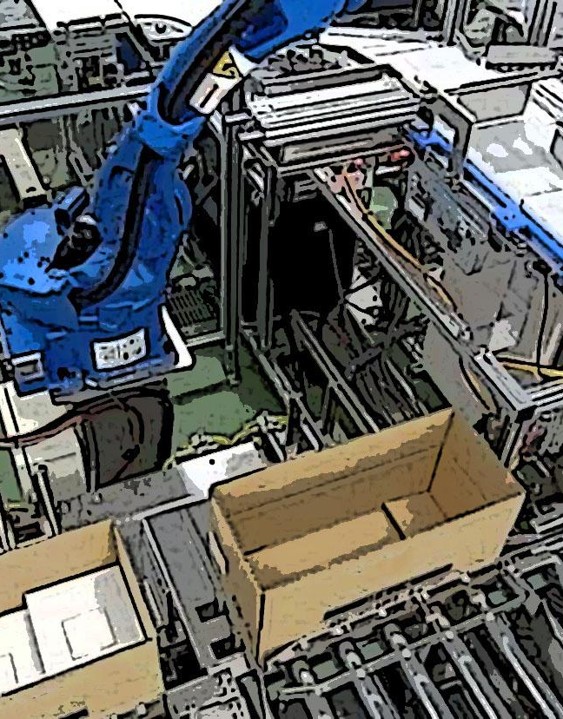
自動箱詰めシステム
上流から流れてくる数種類の小箱を自動で組み立てた段ボールの中に投入し、自動で封をした後に搬送までを行う。
【使用機器と役割】
ロボット:小箱の箱入れ
ロボットハンド:1種類
バーコードリーダー:品種の判別と印刷確認
段ボール供給装置:段ボールの位置決め
製函機:段ボールの組立
封函機:段ボールの封函(蓋閉め)

食品梱包システム
プラスチック容器に入った食品をダンボールへ梱包
標準構成:ロボット周辺(ロボット/フレーム/ハンド等)、制御盤+周辺設備との通信
シュリンク品自動整列システム
シュリンク包装前のプラスチック容器を整列し、向きを整える。(100個/分)
標準構成:ロボット周辺(ロボット/フレーム/ハンド等)、ビジョンシステム、コンベア、制御盤
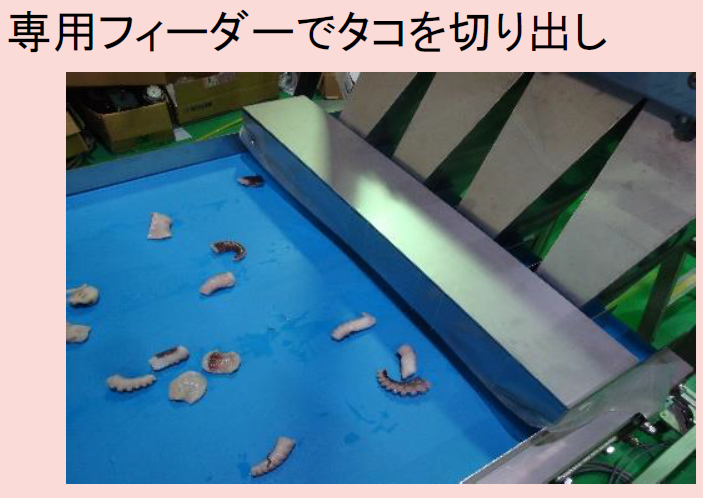
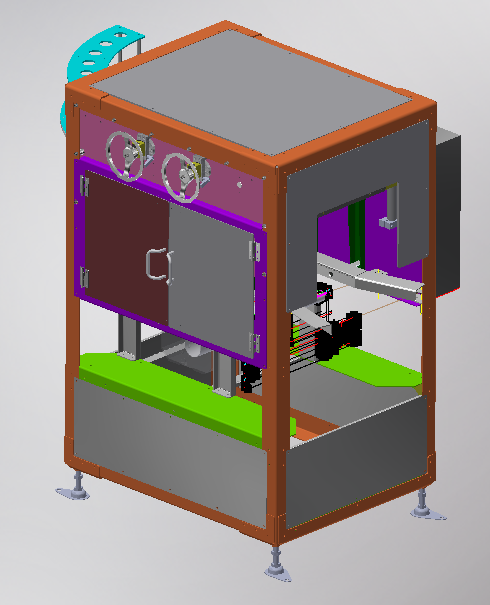
タコ(不定形食材)ピッキングシステム
不定形で粘着性のある食材をピッキングし、焼成機へ投入(1分間に最大250個)
①上流で切り出されたワークを食品をロボットハンドで移載する。
②移載したワークをロボットでまとめて移送する。
標準構成:ロボット周辺2種(ロボット/フレーム/ハンド等)、安全柵、ビジョンシステム、専用フィーダー、制御盤
蓋折装置
箱入れされた段ボールの蓋を折る装置です。
画像は以下例のサイズになります。
箱概寸、箱重量
・最小外寸270 × 180 × 150 mm
・最大外寸340 × 220 × 210 mm
・最小約3kg ~ 最大7kg
上記サイズ以外にも対応可能です。
半自動封函機の前に設置できます。
標準価格には送料/現地セットアップが含まれておりません。

