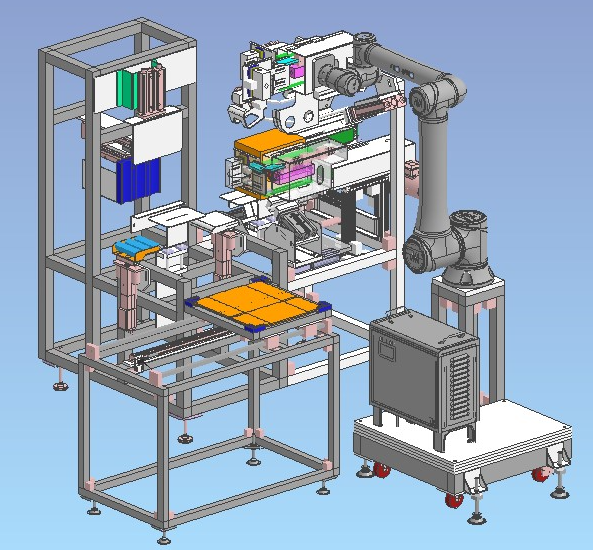
食品パウチ移載システム
- 参考価格
- 50,000,000円
製品・サービスに関する資料
 PDFダウンロード
PDFダウンロード
得意な分野・カテゴリー
惣菜・調理食品
冷凍食品
調味料
担当者からのおすすめポイント!
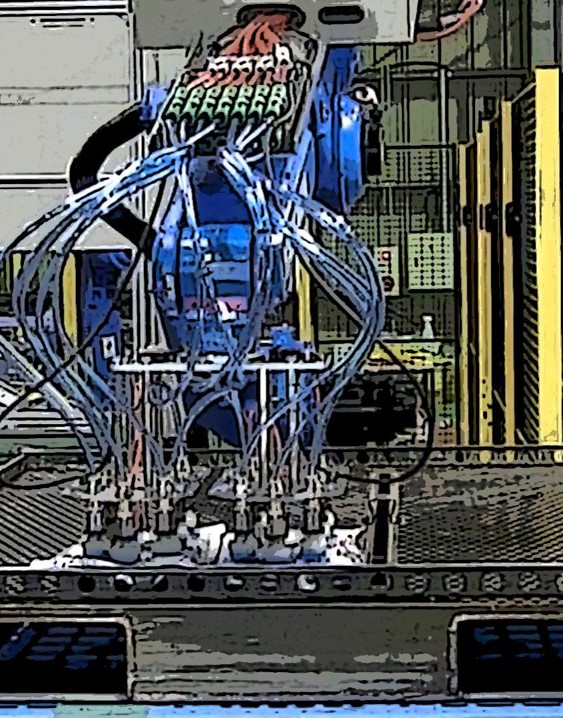
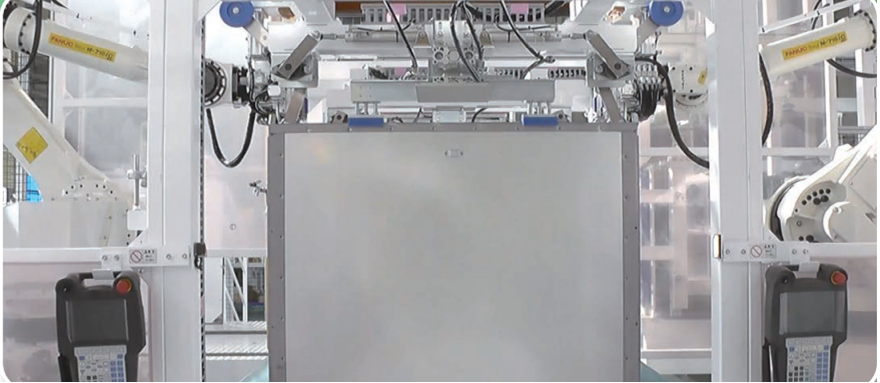
パウチを吸着するハンドを独自開発。
システムは一例になります。
対象ワーク、周辺設備によって変更対応いたしますので
お声がけください。
製品説明・スペック紹介
①上流から流れてくる食品用のパウチをロボットハンドで下流に移載する。
②パウチを搭載している金属のトレイを回収する。
標準構成:ロボット周辺2種(ロボット/フレーム/ハンド等)、安全柵、ビジョンシステム、トレイストッカー、制御盤
取り扱い企業
- 企業名
- サンビット株式会社同企業の情報・その他製品を見る
- 所在地
- 〒812-0012 福岡県福岡市博多区博多駅中央街5-11第13泰平ビル2F
- 電話
- 092-260-7261
- Webサイト
- サービス提供エリア
-
- 関東
- 東京都、神奈川県、埼玉県、千葉県、茨城県、群馬県、栃木県
- 東海
- 愛知県、静岡県、岐阜県、三重県
- 関西
- 大阪府、京都府、兵庫県、滋賀県、奈良県、和歌山県
- 中国・四国
- 鳥取県、島根県、岡山県、広島県、山口県、徳島県、香川県、愛媛県、高知県
- 九州・沖縄
- 福岡県、佐賀県、長崎県、熊本県、大分県、宮崎県、鹿児島県
製品詳細確認・カタログ無料ダウンロード可能







関連キーワード:
アーム 型 ロボット ピッキング ロボット 仕分け ロボット バラ 積み ピッキング ロボット システム 協 働 ロボット 人 協 働 ロボット 人 と ロボット の 協 働 スカラ ロボット 多 関節 ロボット 垂直 多 関節 ロボット ロボット 関節 水平 多 関節 ロボット

