
電動グリッパー コントローラー
- 参考価格
- お問い合わせください
製品・サービスに関する資料
 PDFダウンロード
PDFダウンロード
得意な分野・カテゴリー
物流ライン
パン・菓子
惣菜・調理食品
担当者からのおすすめポイント!
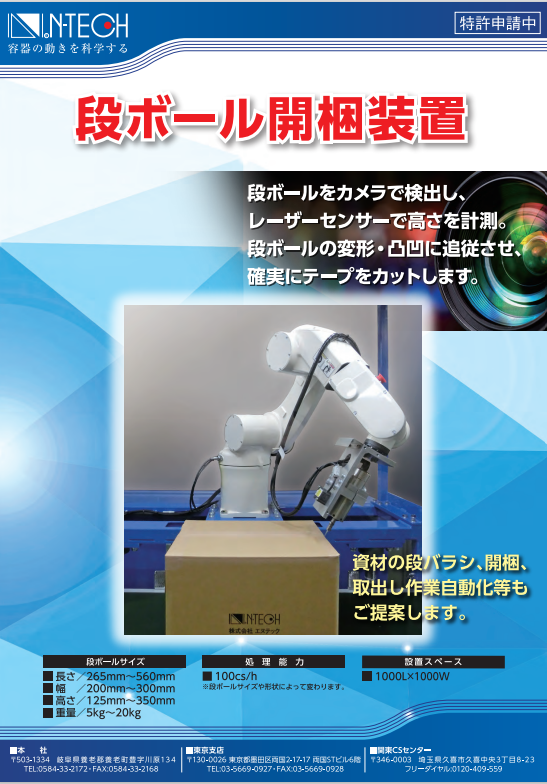
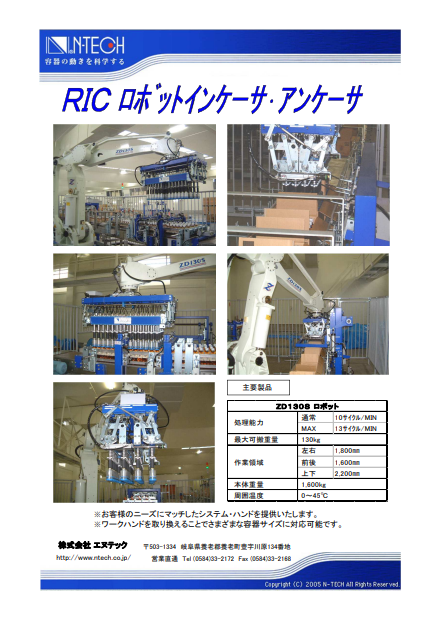
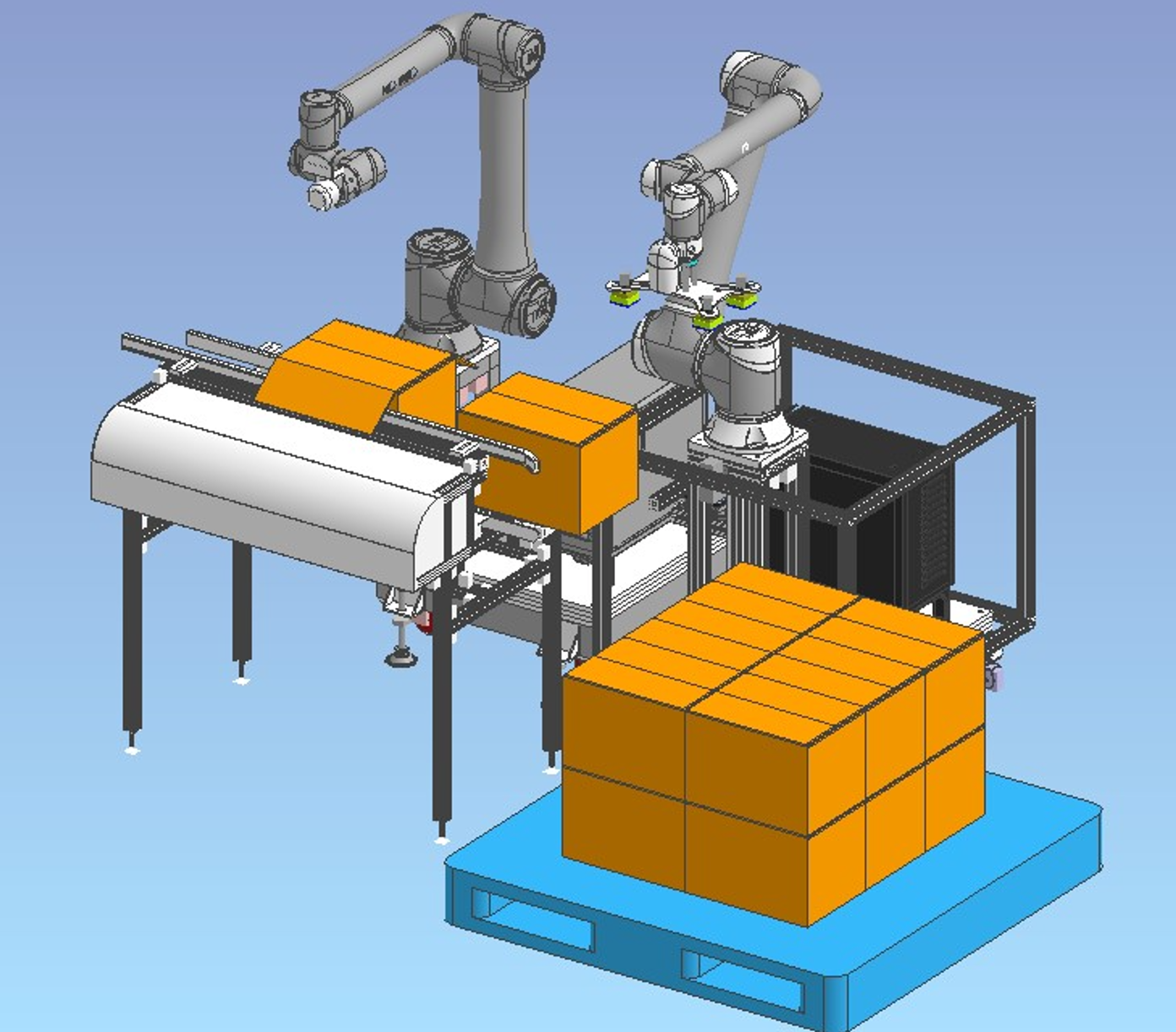
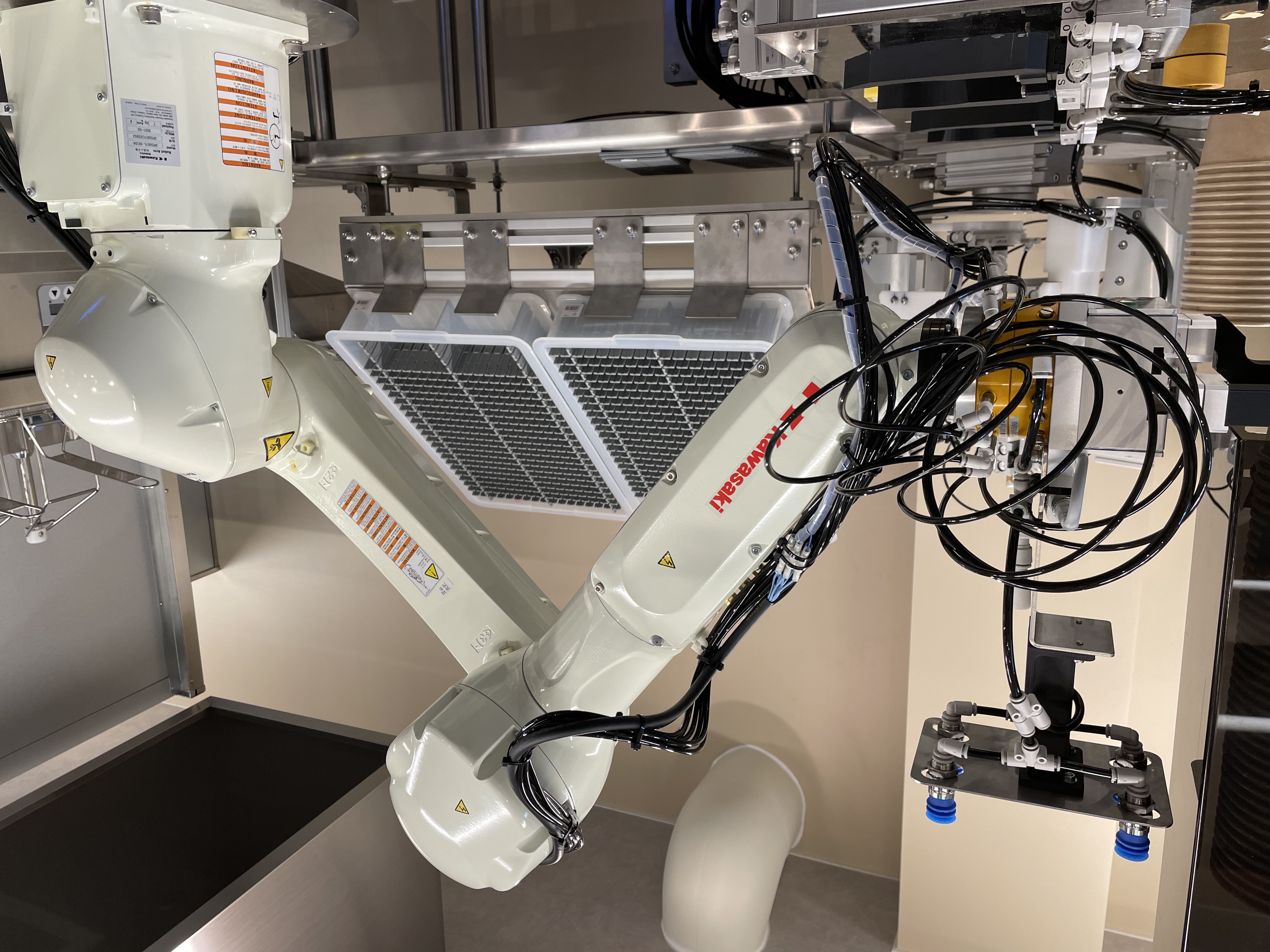
幅広い産業分野に対応します
お気軽にお問い合わせください。
製品説明・スペック紹介
XEGシリーズ用のコントローラー
取り扱い企業
- 企業名
- ハイウィン株式会社同企業の情報・その他製品を見る
- 所在地
- 〒651-2242 兵庫県神戸市西区井吹台東町7-4-4
- 電話
- 078-997-8827
- FAX
- 078-997-2622
- Webサイト
- サービス提供エリア
-
- 北海道・東北
- 北海道、青森県、岩手県、宮城県、秋田県、山形県、福島県
- 関東
- 東京都、神奈川県、埼玉県、千葉県、茨城県、群馬県、栃木県
- 東海
- 愛知県、静岡県、岐阜県、三重県
- 北陸・甲信越
- 山梨県、新潟県、富山県、石川県、福井県、長野県
- 関西
- 大阪府、京都府、兵庫県、滋賀県、奈良県、和歌山県
- 中国・四国
- 鳥取県、島根県、岡山県、広島県、山口県、徳島県、香川県、愛媛県、高知県
- 九州・沖縄
- 福岡県、佐賀県、長崎県、熊本県、大分県、宮崎県、鹿児島県、沖縄県
- 海外
- 海外
製品詳細確認・カタログ無料ダウンロード可能






解決できる課題
関連キーワード:
アーム 型 ロボット ピッキング ロボット 仕分け ロボット バラ 積み ピッキング ロボット システム 協 働 ロボット 人 協 働 ロボット 人 と ロボット の 協 働 スカラ ロボット 多 関節 ロボット 垂直 多 関節 ロボット ロボット 関節 水平 多 関節 ロボット

