ロールフィルム移載装置
- 参考価格
- お問い合わせください
得意な分野・カテゴリー
調味料
物流ライン
飲料・乳製品
担当者からのおすすめポイント!
昨今の作業者確保問題や、腰痛による労災問題を解決する救世主の様な装置です。
既に複数台の実績もございますので、是非ご検討ください。
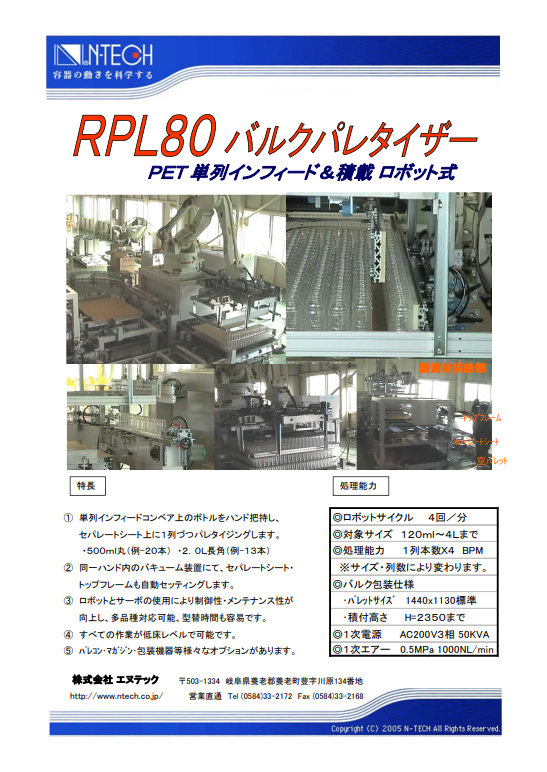
製品説明・スペック紹介
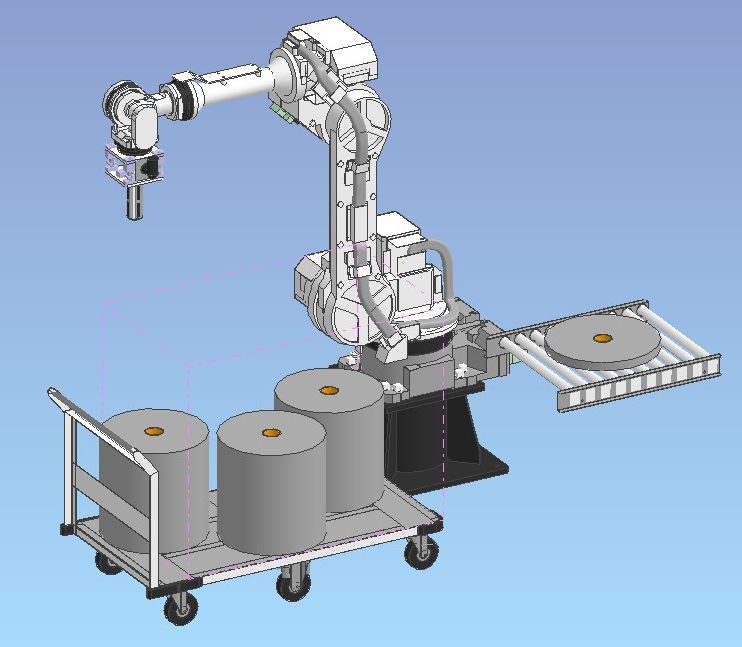
包装資材フィルムロールの自動セット、移載を可能にした自動化設備のご紹介です。
例えば、包装機械へのフィルムセットや、フィルムロールの製造過程で発生する移載作業で、
「作業者様が確保できない」「重労働の為、すぐに辞めてしまう」といったお悩み事はございませんでしょうか。
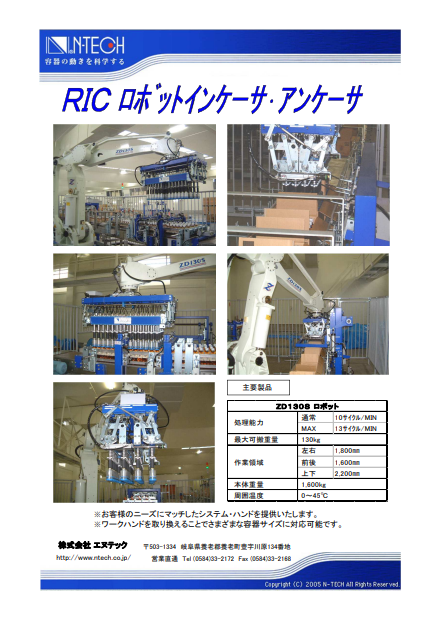
本装置は、産業ロボット、協働ロボットの両方に対応しておりますので、貴社のニーズに合わせてお悩みを解決する事が出来ます。
また、独自設計の専用ハンドを使用しておりますので、製品へのダメージも極めて少なく、人手作業より「安全」「丁寧」「迅速」に作業を完了する事が出来ます。
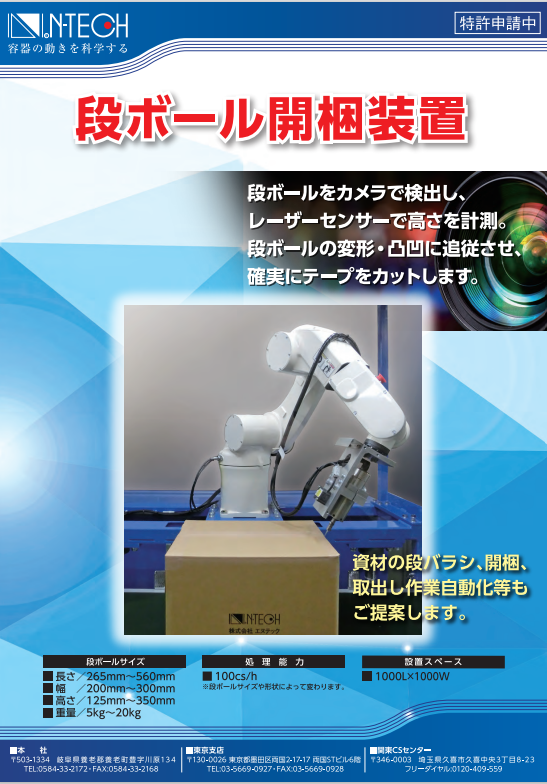
3Dカメラや、AI搭載カメラを使用する事でワークの位置や、状態を判断し動作する事も出来ます。
その他、ご希望によりますが下流工程への搬送、パレタイジング、段積機能も付与する事が出来ます。
取り扱い企業
- 企業名
- アルトリスト株式会社同企業の情報・その他製品を見る
- 所在地
- 〒182-0026 東京都調布市小島町1-1-1電気通信大学UECアライアンスセンター510
- 電話
- 042-444-2477
- FAX
- 042-444-2478
- Webサイト
- サービス提供エリア
-
- 北海道・東北
- 北海道、青森県、岩手県、宮城県、秋田県、山形県、福島県
- 関東
- 東京都、神奈川県、埼玉県、千葉県、茨城県、群馬県、栃木県
- 東海
- 愛知県、静岡県、岐阜県、三重県
- 北陸・甲信越
- 山梨県、新潟県、富山県、石川県、福井県、長野県
- 関西
- 大阪府、京都府、兵庫県、滋賀県、奈良県、和歌山県
- 中国・四国
- 鳥取県、島根県、岡山県、広島県、山口県、徳島県、香川県、愛媛県、高知県
- 九州・沖縄
- 福岡県、佐賀県、長崎県、熊本県、大分県、宮崎県、鹿児島県、沖縄県
製品詳細確認・カタログ無料ダウンロード可能






関連キーワード:
アーム 型 ロボット ピッキング ロボット 仕分け ロボット バラ 積み ピッキング ロボット システム 協 働 ロボット 人 協 働 ロボット 人 と ロボット の 協 働 スカラ ロボット 多 関節 ロボット 垂直 多 関節 ロボット ロボット 関節 水平 多 関節 ロボット

