
マニュアルロボットハンドチェンジャー
ロボット先端のハンド・ツールを交換する手動式のロボットツールチェンジャーで、協働ロボットに最適です。
|形式|SXR
SXR0010:可搬質量 0.5~1kg
SXR0030:可搬質量 3~5kg
SXR0070:可搬質量 7~10kg

ロボットハンドチェンジャー
|形式|SWR
ロボットのハンド・ツールを自動交換するロボットハンドチェンジャーです。
連結時のガタツキゼロで高精度(位置再現精度:3μm)・高剛性(曲げ、ねじりに強い)・高寿命(200万回以上の耐久性)
可搬質量:0.5~360kg可搬

エアスイングクランプ
|形式|WHC
ゴシックアーチ形状の3本リード溝による強靭な機構を搭載した
高寿命・高速・高精度の小型エアスイングクランプ(ロータリークランプシリンダ)です。
オートスイッチの取付が可能で様々な場所でご使用いただけます。
ダストシールで製品内部への異物侵入を防止しています。

ダストカバー付小型平行ハンド
|形式|WPB
カバー付ハンドで異物から保護。
3種類のダストカバー(クロロプレンゴム/シリコンゴム/フッ素ゴム)より選択可能です。

スクリューロケーター
|形式|VXF
パレットやプレートを手動で高精度に位置決めできます。
パレット交換時間を短縮します。
繰返し位置決め精度:0.003mm
|形式|VXE
小型・軽荷重用モデル 繰返し位置決め精度:0.005mm

小型ロケートクランプ
|形式|SWQ
パレットやプレートの段取替えを瞬時かつ高精度に行う位置決め機能付きロケートクランプです。
パレット交換時の精度検査に必要な時間と作業者によるバラツキをなくし、短時間かつ簡単にパレット・プレート・ジグ交換が可能となります。
繰返し位置決め精度:0.003mm

昇降ホールクランプ
|形式|SWJ
リフトシリンダ + 位置決めピン + ホールクランプの役割をまとめて行う昇降ホールクランプです。
(1)リフトアップ →(2)位置決め →(3)パレットの基準穴を内張りして引き込んでクランプします。

オートカプラ
オートカプラは、様々な流体回路を接続します。
コンパクトかつ自動化に適しています。
多くのバリエーションのカプラをラインナップしております。
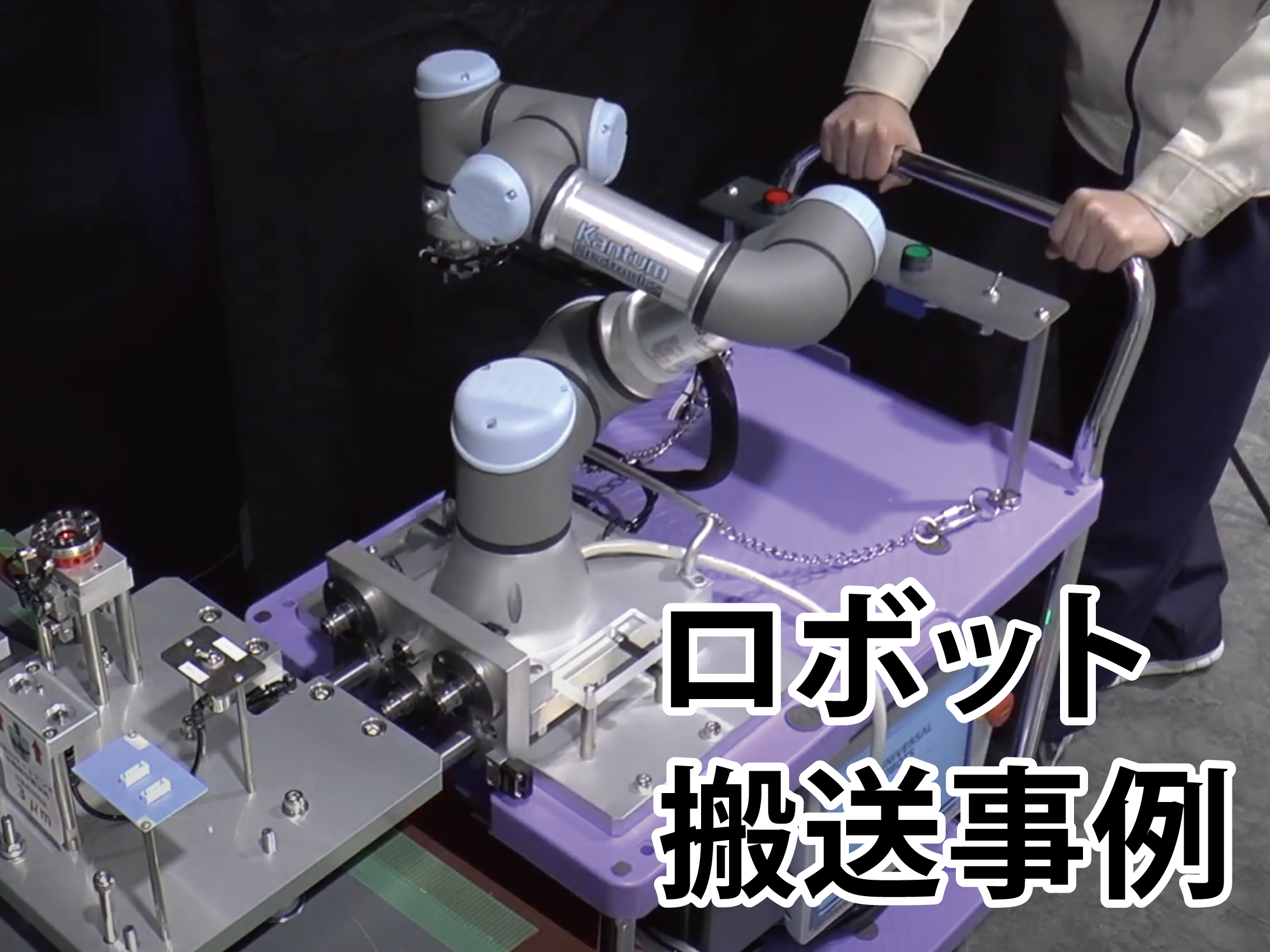
【使用事例】台車でロボットを移動「高精度位置決め事例」
コスメックのFA・産業用ロボット製品を活用し、搬送台車やAGVとロボットを「メカ」でつなぐソリューション展示です。
位置決めクランプであるパレットクランプ(modek WVSやmodelSWT)を活用して、搬送後のロボットをジグとロボットを搭載したパレットを高精度に連結します。
※本事例でのコスメックの商品は位置決めクランプです。ロボット搬送台車は商品ではありません。

