気になる製品をクリックして詳細情報を確認
現在の検索ページ・・・掲載企業一覧
検索結果
290件がヒットしました (全12ページ)
- 並び順
- 件数
-

業務用清掃ロボット『JINNY20』
- 参考価格
- お問い合わせください
小型屋内業務用清掃ロボット『JINNY20』は、ホテルの部屋、オフィススペース、ビルのロビー、小規模な小売店など、コンパクトなスペースでの清掃ニーズに合わせて設計された理想的なロボットです。 吸引、掃き掃除、モップがけ機能を組み合わせ、毛足の短いカーペットやさまざまな床面の掃除作業を簡単に行うことができます。 さらに、JINNY40と連携して同じエリアの複雑な清掃作業を共同で行うこともでき、便利で、徹底した清掃体験を実感できます。 【特徴】 ■25mの最大検知距離を持つレーダーセンサー ■10,000平方メートルの最大マッピング範囲 ■100以上のマップ保存機能 ■10,000Paの強力な吸引力 ■セルフクリーニング ■リアルタイム汚水回収機能 ■障害物乗り上げ可能
-

小型協働パレタイズロボット「Palletizy」
- 参考価格
- お問い合わせください
▮製品・技術・サービス概要 Palletizyは、小型・移動式・簡単操作を特長とする協働パレタイズロボットです。 従来のロボット導入に必要だった複雑なティーチング作業を不要にする「AutoLayout(オートレイアウト)」機能を搭載。 段ボールとパレットのサイズを入力するだけで、最適な積み付けパターンを自動生成し、効率的なレイアウトを推奨します。 これにより、専門知識がなくても直感的な操作で作業が可能となり、誰でも簡単に扱える自動化ソリューションとして、食品工場等の製造現場で省人化・効率化に貢献します。 ▮製品の特徴 ・段ボールとパレットのサイズを入力するだけで、積みレイアウトが自動生成・推薦されるAutoLayout (オートレイアウト)機能を搭載。 ティーチング作業不要のため、専門知識がいらず、誰でも簡単に操作可能。 ・セーフティーセンサーが、人を感知して安全モードに自動切換。 協働ロボットのため、人が接触してもロボットが停止する高い安全性。 ・小型移動式のため、小スペースにも導入可能。 安全柵やアンカー打ち不要のため、導入後も設置場所を変更可能。
-

小袋移載ロボット「PickPacker」
- 参考価格
- お問い合わせください
▮製品・技術・サービス概要 PickPackerは、業界最速*の不定形物バラ積みピッキングを行う小袋移載ロボットです。 特に食品工場における盛付工程の自動化が困難だった不定形物(例:めんつゆ小袋)のピッキングを、高速・高精度で実現。常時1200食/時間の処理能力を誇り、3DビジョンAIと高度なロボット制御技術を組み合わせることで、現場の生産ラインに適応可能な「小型・高精度・高速」なシステムを構築しています。 *当社調べ ▮製品の特徴 ・小型設計 PickPackerは既存ラインに組み込みやすい小型設計で、人と並んで稼働させることができます。 ・3DビジョンAI めんつゆのような形状が変化しやすい物体の検出は、従来困難とされてきましたが、Closerの3DビジョンAI技術により、高精度な位置推定が可能となりました。 ・高度なロボット制御 3DビジョンAIや各種センサと密に連携し、瞬時に計算する高度なロボット制御技術により、高速な小袋投入を実現しました。
-

Dobot協働ロボット 【CR30H】
- 参考価格
- お問い合わせください
次世代フラッグシップモデル 業界最高クラスの300°/秒の動作速度と高可搬質量を備え、 産業オートメーションに革新をもたらします。 ●CR 30H:パワーのために誕生 CR 30Hは、高性能・高安定性・高効率が求められるハイエンド産業オートメーション向けに設計された、重量作業対応の協働ロボットにおける革新モデルです。 業界最速の関節速度300°/秒という驚異的なスピードを実現し、高可搬質量と卓越した安定性を両立することで、生産性の限界を打ち破ります。 ●高速 高速パレタイジング:最高速で生産性を2倍へ ①業界最高クラスとなる300°/秒の関節速度を実現(重量物対応の協働ロボットとして過去最高)。 高速かつ安定したパレタイジング、マテリアルハンドリングを可能とし、生産効率と柔軟性を飛躍的に向上します。 ②よりスマートで確かな性能:HyperMove™モーションコントロールを搭載し、加速度をインテリジェントに調整して常に最大の信頼性と速度を維持。単体で他社比20%以上の効率向上を実現します。 パレタイジング/ハンドリング速度:10個/分:従来のパレタイジングシステムとは一線を画し、CR 30Hのソリューションがこれまでにない次世代の自動パレタイジング性能を発揮します。 ●高安定性 ①高速・高荷重でも高い安定性 <0.3mmの振動幅を実現 高度な振動抑制アルゴリズムにより、あらゆる速度・荷重範囲で振動やエンドエフェクタの揺れを効果的に低減します。 ②優れた信頼性と妥協のないパフォーマンスを追求 高密度サーボドライブ技術:高性能パワーエンジンと96V中電圧サーボ技術を搭載。発熱を20%低減しながら、従 来比50%の出力向上を実現します。 最適化された関節設計:部品数を30%削減し、荷重分散を最適化。個々の部品へのストレスを大幅に低減し、ダウンタイムも45%短縮します。 ③優れた信頼性と妥協のないパフォーマンスを追求 フェイルセーフ電磁ブレーキ:停電時、電磁ブレーキが自動的に作動し、エンドエフェクタの変位を1mm未満に抑制。高い安全性と精密性を確保します。 IP67の堅牢設計:粉塵、水や油の侵入から保護され、過酷な環境でも安定した動作が可能です。 ●よりスマート スマートな協働で、さらなる効率向上を実現 片手ドラッグティーチ:業界初30kg可搬協働ロボットでトルクセンサー内蔵。ティーチング効率が90%向上し、現場の生産性を大幅に引き上げます。 高速制御周期:1kHzのリアルタイム制御で、指令遅延を低減。ロボットの高速動作中もオーバーシュートを防ぎ、安定した運転を実現します。 ●国際的な品質基準 圧倒的な性能、妥協なき品質、そして安心の導入実績 ①国際認証基準 ②週7日・1日12時間体制のサービス ③世界中で専門的な技術サービスを提供 ④主要部品の90%を自社開発・製造
-

人気機種の後継機!配膳・運搬ロボット『KettyBot Pro』
- 参考価格
- お問い合わせください
人気ポイント+アップデート内容は5つ! ■大型ディスプレイ 18.5インチのモニターが搭載されており、動画や静止画を再生でき、 お知らせやキャンペーン情報など広告効果が見込めます。 ■コンパクトなデザイン 本体自体がコンパクトで、最小走行幅が55cmから52cmへ アップデートされ、更に小回りが利く設計になっています。 ■【新機能】トレイカメラセンサー 1段目と2段目のトレイの上部にはカメラセンサーが搭載されており、 トレイ上にある料理などの積載物を検出可能です。 ■【改良】サスペンション性能の向上 駆動輪と補助輪の双方にサスペンションを実装し、ロボットの走行安定性を大幅に向上 ■【改良】バッテリーの性能向上 バッテリーの大容量化により、最大稼働時間が11時間へ向上 【仕様(抜粋)】 ■本体サイズ(W×D×H):43.5 × 45.0 × 112.0(cm) ■最小走行幅:52cm ■本体重量:38kg ■トレイ数:デフォルト2段+バット1 ■積載量:最大30kg(各段10kg) ■トレイサイズ(W×D) ・外寸:34.0×35.2(cm) ・内寸:34.0×35.2(cm)
-

1台4役の自動清掃ロボット『PUDUCC1』
- 参考価格
- お問い合わせください
『PUDUCC1』は、猫型の配膳ロボット「BellaBot」のメーカーが 手掛ける清掃ロボット。 POPな見た目とカラーが特徴。 吸引・水拭き・掃き・乾拭きを担う業務用自動掃除ロボットです。 ポイントは4つ! ■超吸引力 サイドブラシを利用し500mm(掃き幅含む)清掃が可能。1700Paの吸引により大きなゴミも吸引します。 ■スケジュール設定 清掃スケジュールに合わせてエリア別に清掃実施の設定が可能 ■操作しやすいステアリングハンドル 手動清掃時や移動時に操作しやすいハンドルを搭載 ■自動充電ステーション(オプション) バッテリー残量が少なくなると、ロボットは自動的に充電スタンドに 戻ります。また、給排水を行えるステーションもご用意可能です。 「業務過多」「コスト削減」「高齢化」「作業ムラ」などにお悩みの方は 是非お問合せ下さい。 本体サイズ(mm)/W×H×D:663×568×682mm 本体重量:75kg 掃き幅:500mm こすり幅:400mm タンク水量:給水15L/排水15L 運転音:70dB未満 充電時間:4時間 稼働時間:3~8時間 清掃効果:700~1000m²/h 1充電清掃面積:V:3,500m² W:5,000m²
-

300kgまでの重量物運搬が可能に!『PUDU T300』
- 参考価格
- お問い合わせください
『PUDU T300』は、USENで初めて取り扱う重量物運搬ロボットになります。 ポイントは3つ! ■重量運搬 最大300kgまで積載可能で、重量物も指定された目的地まで自律運搬することができます。 ■リフトアップ リフトアップ機能で重量のある積載物であっても積載時や荷下ろし時に負担を軽減します。 ■アタッチメントカスタム 積載物の形状や積載方法等に合わせて、アタッチメントを追加することで、 様々なカスタマイズが可能です。(アタッチメントをご利用希望の場合は事前にご相談下さい) 【仕様(抜粋)】 ■本体サイズ(W×D×H):50 x 78 x 134 (cm) ■最小走行幅:60cm ■本体重量:80kg ■積載量:最大300kg ■連続稼働時間:12時間(300kg荷重の場合は約6時間) ■充電時間:2時間 ■積載プレートサイズ:D 64.6 × W 48.0 (cm)
-

ドライ清掃特化型 『KLEENBOT C30』
- 参考価格
- お問い合わせください
『KLEENBOT C30』は、ドライ清掃に特化した清掃ロボットになります。 ポイントは3つ! ■ドライ清掃特化 1台で3種のドライ清掃(掃き掃除・吸引・モップ掛け)が可能 湿式清掃をなくすことで低コストを実現 ■コンパクトな機体 最小走行幅65cmを実現し、比較的軽量なロボットのため使用感◎ ■シンプル設計 ダストバッグやブラシの着脱など簡単でメンテナンスしやすい設計 本体サイズ(mm)/W×D×H:490×520×750mm 本体重量:35kg 運転音:70dB未満 充電時間:5~6時間 稼働時間:6~10時間 清掃効果:600m²/h
-

AI搭載の清掃ロボット『PUDU MT1』
- 参考価格
- お問い合わせください
『PUDU MT1』は、掃き清掃・集塵清掃に特化したドライ型清掃ロボットになります。 ポイントは4つ! ■ドライ特化の清掃 水などの液体を利用しない清掃ロボットのため、メンテナンスなどが 湿式型のロボットに比べて簡単 ■AI搭載 カメラ+AIで認識したゴミの種類に応じ自動で最適な清掃を実施 ※ゴミの大きさや環境によってはAI認知が出来ない場合があります。 ■広面積の清掃に最適 1回の充電でサッカーコート2面分を清掃できると言われています。 ※使用環境によって異なります。 ■その他 ・アプリを使った遠隔モニタリングとレポート出力 ・EV連携で上下階層の移動が可能に 本体サイズ(mm)/W×D×H:70.0×84.0×49.0mm 本体重量:75kg 充電時間:3時間未満 稼働時間:4~8時間 清掃効果:1800~6000m2/h
-

あの猫型ロボットの最新後継機『BellaBot Pro』
- 参考価格
- お問い合わせください
配膳ロボットが世に広まったあの猫型ロボットの後継機『BellaBot Pro』 特徴(既存機能/追加機能に分けてご紹介します) <既存機能> ■大容量の配膳・運搬 大型トレイ(410×500mm、1トレイ10kg積載可能)が4段搭載されており、 大容量の積載物を一気に配膳・運搬できます。 ■取り間違え防止機能 積載物が到着すると音声でご案内&該当トレイのLEDライトが光るため、 配膳・運搬されたお客様は自分がどの料理を取るべきかが一目でわかります。 <追加機能> ■新たに液晶サイネージを搭載 他機種でも非常に人気だった液晶サイネージが搭載されました。 広告やお知らせなど静止画/動画様々なメディアを投影することが可能です。 ■トレイカメラセンサー 積載物が配膳・運搬完了したことをビジュアルで認識。 そのまま次のタスクへ自動的に移行します。 【仕様(抜粋)】 ■本体サイズ(W×D×H):55.0 × 57.0 × 129.0(cm) ■最小走行幅:65cm ■本体重量:57kg ■トレイ数:4段 ■積載量:最大40kg(各段10kg) ■トレイサイズ(W×D) ・外寸:50.0×41.0(cm) ・内寸:47.5×38.5(cm)
-

業務用清掃ロボット MT1シリーズ
- 参考価格
- お問い合わせください
PUDU 業務用清掃ロボット「MTシリーズ」 PUDU RoboticsのMTシリーズは、大規模施設向けに設計された業務用乾式床清掃ロボットです。 AIによるゴミ認識、超広角スキャン、高い清掃能力、24時間連続稼働に対応し、商業施設・工場・物流施設・屋外エリアなど幅広い環境で活躍します。 ★MT1 デュアルディスクブラシを搭載し、大きなゴミから微細な粉塵まで幅広く対応する基本モデル。 高精度センサーによりゴミを検出し、効率的な清掃を実現します。 主な特長 ・デュアルディスクブラシで落ち葉・ボトル・ガラスなどの大型ゴミも処理可能 ・細かいほこり・粒子まで確実に除去 ・超広角スキャン視野による高精度なゴミ検出 ・AIによるアクティブなスポット清掃 ・急速充電+自動ドッキング対応 ・24時間365日連続稼働(1日最大3回のフル充電) 仕様概要 対応面積:100,000㎡以上 清掃対象:ほこり/紙くず/ナッツ殻/ボトル/ガラス/落ち葉 など 清掃効率:最大 6,000㎡/時 ★MT1 Max(屋外・高難度環境対応モデル) MT1をベースに、半屋外・駐車場・動的障害物の多い環境向けに強化した上位モデルです。 主な特長 ・3D LiDAR搭載による高精度な環境認識 ・デュアルSOCチップによる高速演算処理 ・障害物乗り越え能力の向上 ・高速で移動する障害物にも対応 ・半屋外・中庭・駐車場など複雑環境に最適 ・AIによるアクティブなスポット清掃 仕様概要 対応面積:100,000㎡以上 清掃対象:ほこり/紙くず/ナッツ殻/ボトル/ガラス/落ち葉 など 清掃効率:最大 7,000㎡/時 ★MT1 Vac(強力吸引モデル) 従来のMT1に高性能バキューム機能を追加したモデル。 粉塵の舞い上がりを抑えながら、こびりついた汚れや微粒子まで強力に吸引します。 主な特長 ・強力な真空吸引で微細な粒子・頑固な汚れも除去 ・吸引時の粉塵飛散を抑制 ・複雑な床環境にも対応 ・超広角スキャン視野+AIスポット清掃 ・急速充電+自動ドッキング対応 ・24時間365日連続稼働 仕様概要 対応面積:100,000㎡以上 清掃対象:ほこり/紙くず/ナッツ殻/ボトル/ガラス/落ち葉 など 清掃効率:最大 6,000㎡/時 ~MTシリーズ比較一覧~ 機種 特徴 清掃効率 推奨環境 MT1 標準モデル/ブラシ清掃 6,000㎡/時 商業施設・工場・倉庫 MT1 Max 屋外対応・高認識性能 7,000㎡/時 中庭・駐車場・半屋外 MT1 Vac 強力吸引・粉塵対策 6,000㎡/時 粉塵が多い施設・精密現場 ※詳しい仕様・価格についてはPDF資料をご確認いただくか、お気軽にお問い合わせください。
-
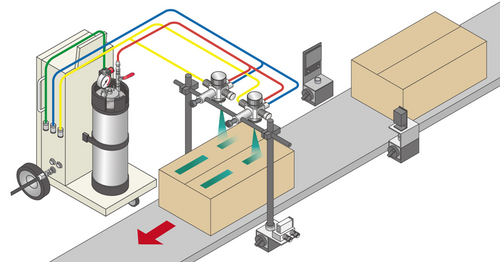
パレタイズグルー塗布システム
- 参考価格
- お問い合わせください
電源 [V]:100(3P) 電流 [A]:10 空気圧力 [MPa]:0.5 空気量 [L/min]:800 寸法 スプレーユニット [mm]:530×446×1005 操作方法:タッチパネル式 塗布ポイント数:2または4か所 ※自動スプレーガン・加圧タンクは別売りです。 ※塗布量によってスプレーガンとタンクをお選びいただけます。 ※ダンボールの材質によって効果に違いがございます。
-
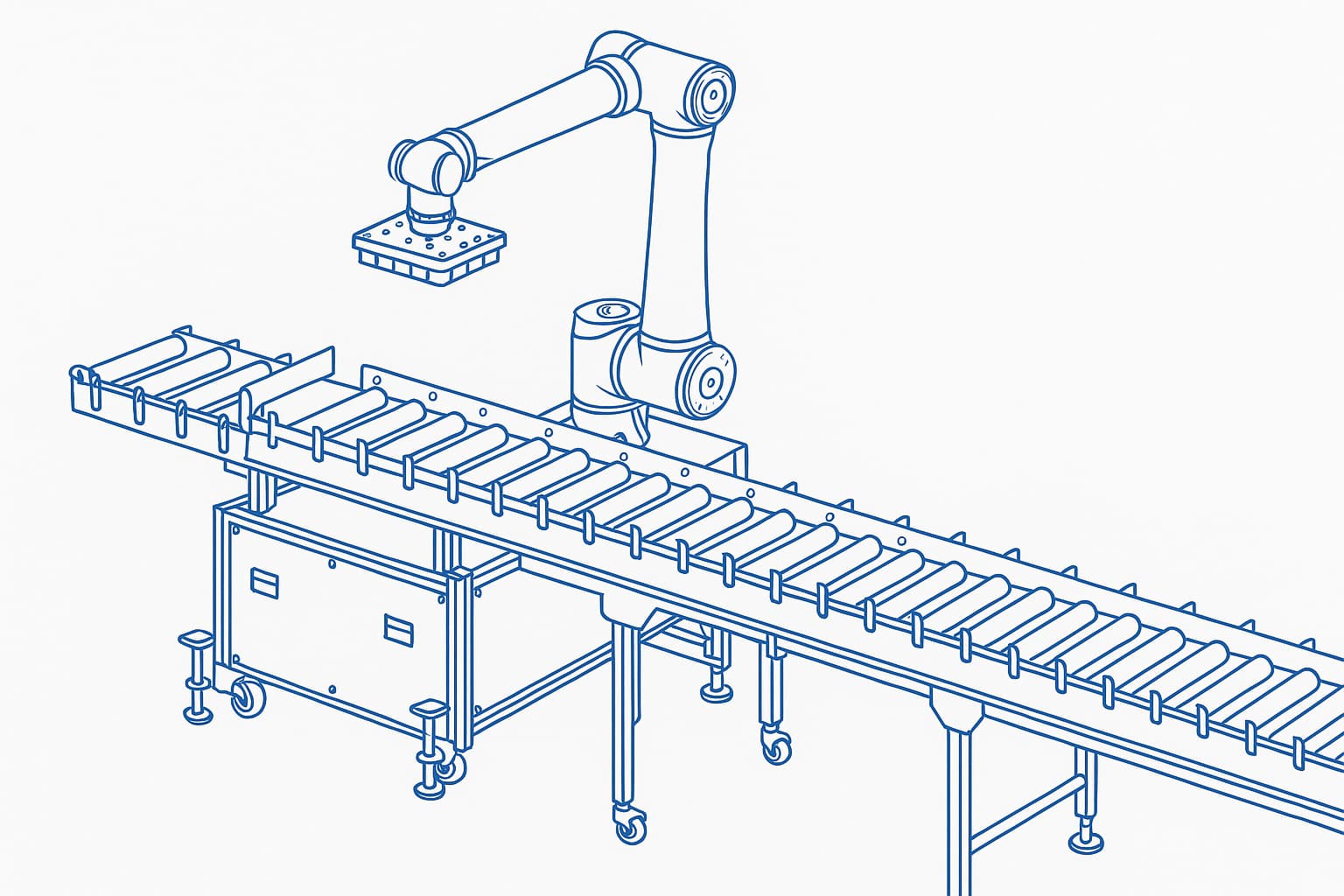
移動式パレタイズシステム
- 参考価格
- お問い合わせください
・製品カテゴリ:移動式ロボットパレタイズシステム ・構成:協働ロボット+コンベア+移動式台車 ・特徴:ティーチングレス制御、移動運用、省スペース設計 ・操作:タッチパネルによる簡単設定 ・運用:複数パレット対応、品種変更対応可能
-
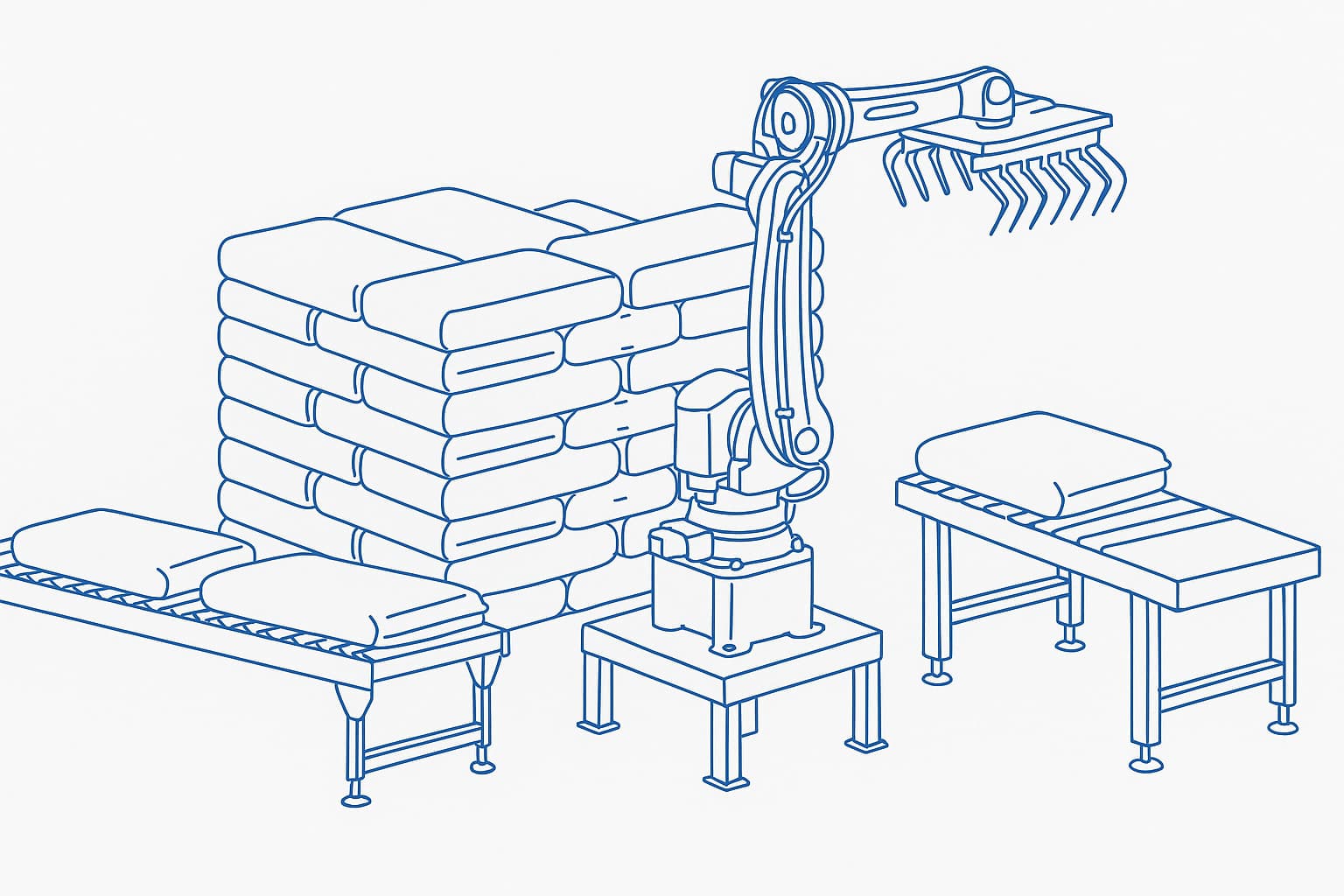
袋もの用ハンド(移動式パレタイズシステム オプション)
- 参考価格
- お問い合わせください
・対象:袋物ワーク用ロボットハンド ・用途:パレタイズ工程での搬送・積付 ・仕様:ワークに応じた個別設計(形状・サイズにより変動)
-

産業用ロボット
- 参考価格
- お問い合わせください
食品の搬送・整列・箱詰めなどを自動で行い、生産ラインの効率化と省人化を実現する産業用ロボットです

