気になる製品をクリックして詳細情報を確認
現在の検索ページ・・・掲載企業一覧
検索結果
48件がヒットしました (全2ページ)
- 並び順
- 件数
-

マニュアルロボットハンドチェンジャー
- 参考価格
- 12,100~68,600円
ロボット先端のハンド・ツールを交換する手動式のロボットツールチェンジャーで、協働ロボットに最適です。 |形式|SXR SXR0010:可搬質量 0.5~1kg SXR0030:可搬質量 3~5kg SXR0070:可搬質量 7~10kg
-

piSOFTGRIP
- 参考価格
- お問い合わせください
食品用ピッキングハンド FDA対応シリコン採用
-

ハーモ製平行チャック
- 参考価格
- 27,500~46,200円
コンパクト、軽量、ハイサイクル化を実現した平行チャック。 特長 1.コンパクトな楕円シリンダにより省スペース、軽量化、ハイサイクル化を実現した平行チャック。 2.軽量化を実現したプラスチックタイプと耐久性に優れたダイキャストタイプを用意。 3.センサ付タイプは、LEDの点滅により作動確認、クランプ確認が一目でできます。 近接スイッチが横にスライドするため、ワークに合わせて調整することが可能。
-

SMARTSHIFT ロボットシステム SSR
- 参考価格
- 56,000円
SMARTSHIFTスマートシフト ロボットシステムはツール交換に電力やエアは不要 ロボットアームの直進運動を利用した簡単なツールチェンジが可能です。 主に協働ロボットや小型産業用ロボットでご利用いただけます。 コンパクトで軽量、ロボットによる素早いツール交換だけでなく、人による手動交換もワンタッチで行えます。 さまざまな作業でロボットの有効活用ができ、ロボットの稼働率向上と導入効果を引き出します。 [特長] ツール交換時の駆動源にエア・電気不要! 本体はシンプルなメカ式機構で、ツール交換時の駆動源としてエアや電気は使用しません。 ツール交換に高精度なティーチング不要! ロボットによる自動交換はロボットアームの直進運動のみで行います。 交換時の高精度なティーチングや煩わしい制御は不要です。 自動交換手動交換どちらも対応! ボタンを押しながらスライドして挿入するだけの手動交換も可能です。 エア・電気パススルー内蔵あらゆるツールに対応! 空気インターフェースを標準装備し、電気インターフェースも備えたタイプもご用意。 軽量・コンパクト! 本体サイズは直径63mmとコンパクト。総重量約400gと軽量でロボットの可搬重量への影響も少ないです。
-

吸着パッド 形番 VSP
- 参考価格
- お問い合わせください
【新タイプ:フラットタイプ】 シート・ビニールなど、薄物ワークの搬送に最適なフラットタイプ。 吸着時にワークの変形・シワ軽減に配慮。 【新タイプ:吸着痕防止タイプ】 液晶ガラス、塗装工程、半導体設備の搬送に最適な吸着痕防止タイプ。 フレキシブルを設けた吸着痕がつきにくい樹脂材質でワークを吸着。 材質:PEEK,POM,導電性PEEK
-
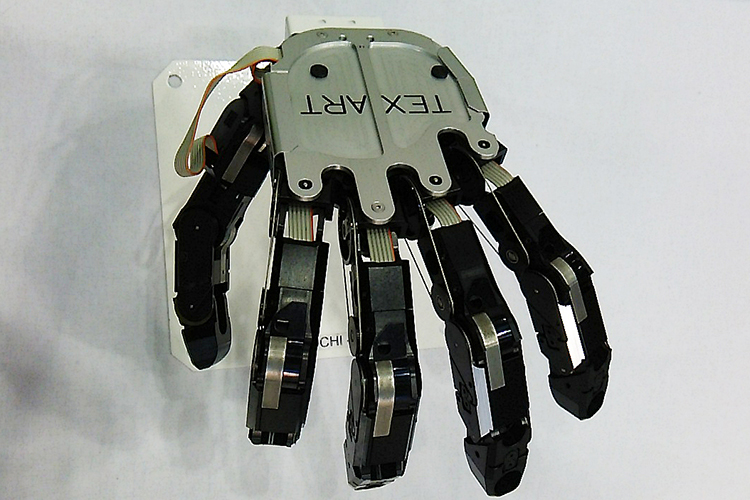
ロボットハンド類
- 参考価格
- お問い合わせください
ロボット化ビジネスにおいて最重要となるロボットハンドを自社にて開発・設計・製作します。多彩な商品に対応したロボットハンドをご提案致します。
-

触覚センサユニット
- 参考価格
- お問い合わせください
画像処理を使って触覚を再現するセンサです。 ROSトピックで力分布と滑り分布を使用し、マルチモダリティに触覚を数値化できます。 食べ物の食感などの数値化などご検討されている方はぜひお声掛けください。
-

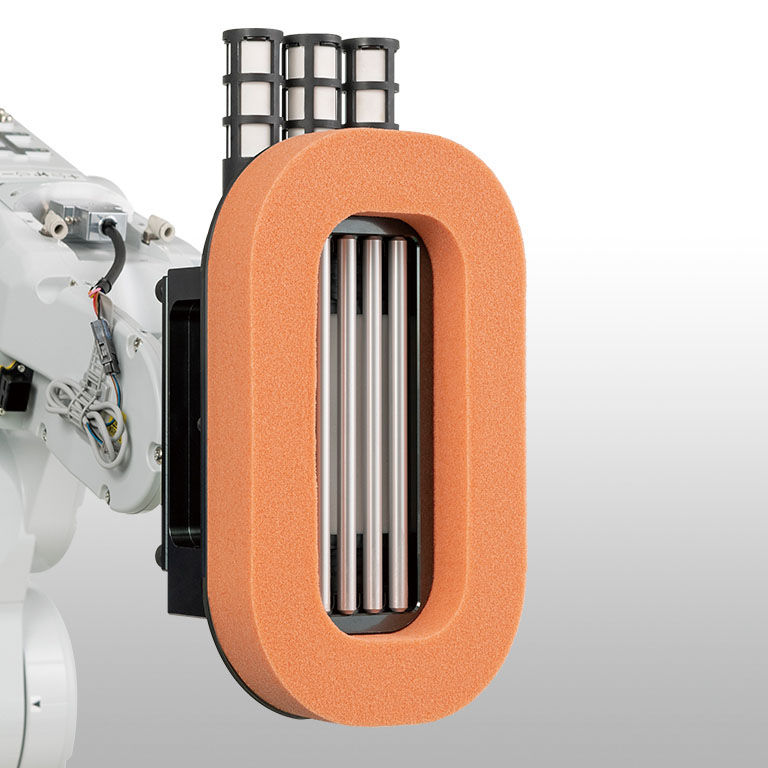
ならいハンド
- 参考価格
- お問い合わせください
特長 ならい機構による姿勢の維持 12本のシャフトがワークの凸凹にならってロックする構造となっているため、複雑な形状のワークでも安定して吸着または把持ができ、ピックアップ時の姿勢を維持したまま搬送し着座させることができます。 小型軽量 ならい機構部は12本のシャフトを断面寸法□60mmに配置したコンパクトな設計で、質量は「ならい吸着ハンド」が0.5kg、「ならいグリップハンド」が1.2kgと、協働ロボットに搭載するには最適なサイズと質量です。 取付規格はISO規格に対応 「ならいグリップハンド」および「ならい吸着ハンド」の取付フランジは、産業用ロボット・サービスロボット関連規格(ISO9409-1-50-4-M6)のロボットに取付可能です。 EC指令への適合 「ならい吸着ハンド」および「ならいユニット」は、EC指令に対し「半完成品」として組み込み宣言します。 お客様の装置に組み込んで使用する部品扱いのため、製品にCEマークを貼付しておりません。
-

UJC-3シリーズ (直交ロボット)
- 参考価格
- お問い合わせください
製品説明 自動ラインへの組み込みが適した、ロボット本体と専用のコントローラをセットにした 多機能で使いやすい3軸・4軸の直交ロボットです。 ストローク範囲:X軸200~600mm/Y軸200~500mm/Z軸50~300mmまで 取り揃えておりますのでご用命の際にはお問い合わせください。 <特長> ●高精度:繰り返し位置決め精度は±0.02mmと高精度です。 ●滑らかな動き:マイクロステップ制御により、振動が少なく滑らかな動作です。 ●豊富な外部機器との連動: 簡易シーケンサを標準で搭載し、エリアセンサーや表示灯などの増設・連動が簡単に行なえます。 ●LANポート標準装備: PCと接続しティーチングデータの送受信やPCから複数台の運転状況管理を行うことも可能です。 ●ビジョンシステム(オプション) : 微細分化する製造作業に合わせカメラ機能を強化。ビジョンシステムを容易に導入が可能です。 ●対話方式プログラミング: 従来の一方的な指示(入力)では無く、プログラムの入力毎に次の設定をロボットから作業者へ確認します。 ●解り易いプログラム構成:一からのプログラム作成・編集も簡単ですし、引継いだ方もプログラム解読し易い構成です。 ●ティーチングペンダントは11ヵ国語に対応しています。 ●自己診断機能を搭載:自己診断機能により、お客様側で不調箇所を特定できますので、スピーディーなメンテナンス対応が可能です。 ●ノズル交換時の自動調整(オプション):ニードルアジャスタを使用し、ノズル位置の誤差(個体差)をX・Y・Zの3軸で補正が可能です。
-

ロボット
- 参考価格
- お問い合わせください
ロボットの選定からハンドの設計製作まで、用途に応じてご相談をお受けいたします。
-

エアスイングクランプ
- 参考価格
- 12,980~20,000円
|形式|WHC ゴシックアーチ形状の3本リード溝による強靭な機構を搭載した 高寿命・高速・高精度の小型エアスイングクランプ(ロータリークランプシリンダ)です。 オートスイッチの取付が可能で様々な場所でご使用いただけます。 ダストシールで製品内部への異物侵入を防止しています。
-

ダストカバー付小型平行ハンド
- 参考価格
- 31,000~49,000円
|形式|WPB カバー付ハンドで異物から保護。 3種類のダストカバー(クロロプレンゴム/シリコンゴム/フッ素ゴム)より選択可能です。
-

スクリューロケーター
- 参考価格
- 5,800~22,000円
|形式|VXF パレットやプレートを手動で高精度に位置決めできます。 パレット交換時間を短縮します。 繰返し位置決め精度:0.003mm |形式|VXE 小型・軽荷重用モデル 繰返し位置決め精度:0.005mm
-

小型ロケートクランプ
- 参考価格
- お問い合わせください
|形式|SWQ パレットやプレートの段取替えを瞬時かつ高精度に行う位置決め機能付きロケートクランプです。 パレット交換時の精度検査に必要な時間と作業者によるバラツキをなくし、短時間かつ簡単にパレット・プレート・ジグ交換が可能となります。 繰返し位置決め精度:0.003mm
-
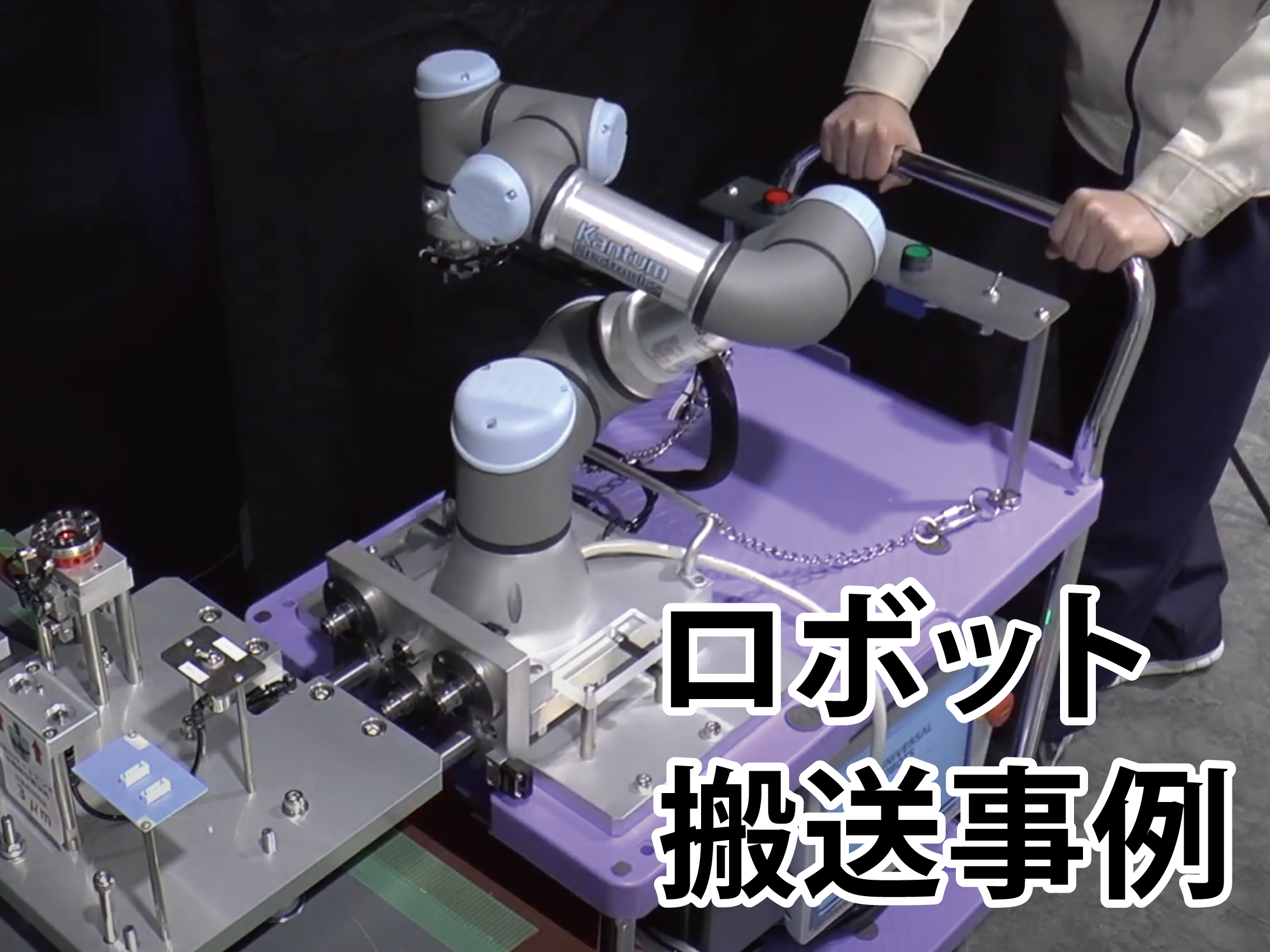
【使用事例】台車でロボットを移動「高精度位置決め事例」
- 参考価格
- お問い合わせください
コスメックのFA・産業用ロボット製品を活用し、搬送台車やAGVとロボットを「メカ」でつなぐソリューション展示です。 位置決めクランプであるパレットクランプ(modek WVSやmodelSWT)を活用して、搬送後のロボットをジグとロボットを搭載したパレットを高精度に連結します。 ※本事例でのコスメックの商品は位置決めクランプです。ロボット搬送台車は商品ではありません。
-

包装袋用真空パッド
- 参考価格
- 2,365~3,630円
<特長> 柔軟なリップが「確実な吸着搬送」を実現します。 吸込防止アダプタが「吸着痕を低減」します。 被搬送物との接触部は、食品衛生法適合、FDA準拠の素材を採用し、安心してご使用いただけます。 被搬送物に合わせて、①パッドサイズ(5種類)、②リップ硬度(2種類)、③蛇腹段数(2種類)、④吸込防止アダプタ形状(4種類)の合計80通り組合せが可能です。
-

真空パッド金属検知用タイプ
- 参考価格
- 990~1,210円
シリコーンゴムに金属粉を配合。パッドゴムの破片落下による混入が発生した際、金属検出機に反応。 鉄粉仕様とSUS粉仕様を用意。 業界初のSUS粉仕様は、ゴムの摩擦粉が錆びにくい。 ※SUS粉仕様は、検出器の設定条件や製造食品によっては検出できない場合がありますので、事前に実機にて確認してください。 鉄粉仕様は、他社と比較して反応比2倍以上。(※当社調べ) 吸着面には、リブ有りタイプとリブ無しタイプを用意。 ゴムの硬度は、30°と50°の2種を用意。 ゴム硬度をカラーで識別。 リップ部と蛇腹部の貼付きを抑制。(当社従来品との比較) 貼付防止用の突起付き。 パッド材質が一目でわかる識別記号付。
-

真空パッドベローズ・多段ベローズ柔らかタイプ
- 参考価格
- 1,551~2,134円
レトルトパックや食料品などが入った袋の搬送に最適。 レトルトパックや食料品などが入った袋の搬送に最適。 豊富なパッドサイズ、パッド材質、ホルダ形状のバリエーション。 パッドサイズ:5種。 パッド材質:8種。 ホルダ形状:12種。 スプリング式ホルダのストロークが選択可能に。 従来のロングストロークカバー付ホルダをVPC、VPDと統合。 ストローク:6、10、15、20mm 従来のロングストロークカバー無しホルダはVPOC、VPODとしてリニューアル。 ストローク:20、30、40、50mm スプリング式ホルダに低発塵タイプが新登場。 従来のスプリング式ホルダに比べ低発塵。 騒音レベル:45dBで低騒音を実現。 パッド全サイズに接続可能。 ストローク:2、5、10、15、20mmを用意。 「銅を主成分とする材料不使用」・「低濃度オゾン対策」向けの分野に対応するパッドホルダも用意。 -S3仕様:金属部材質は銅を主成分とする材料不使用,シールゴム材質にはHNBRまたはFKMを採用。 柔らかタイプは食品業界におすすめ! 食品業界向けのとてもやわらかいシリコーン製真空パッド。食品衛生法・FDA準拠。
-
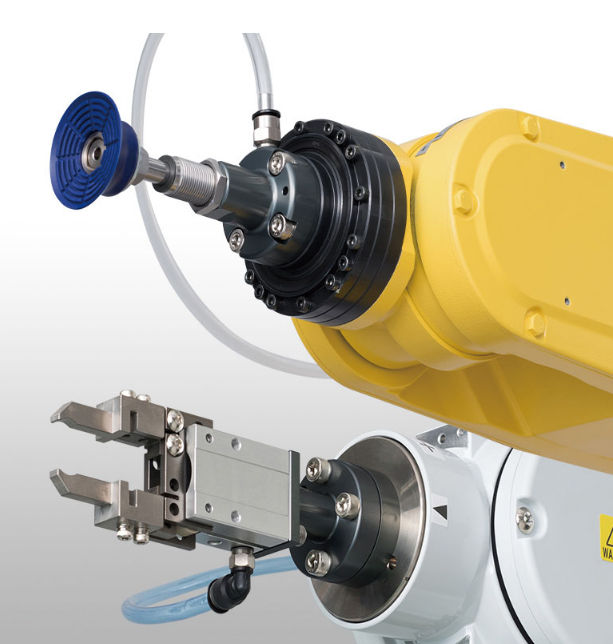
真空グリッパ
- 参考価格
- お問い合わせください
軟性のスポンジ製パッドにより、凹凸や変形のあるワークに追従して吸着 スポンジ材質:2種(3タイプ)、スポンジ高さ:3種を用意。 材料袋などの大袋やシュリンクしたペットボトル、段ボールの吸着搬送に最適 スポンジパッドは、プレートの取替えにより交換可能 ワークサイズに合わせたパッドサイズの製作も可能 大流量真空発生器を内蔵 P.C.D. 40, P.C.D. 56, P.C.D 80のロボットに直接取付け可能。 最大吸込流量:760ℓ/min(※1)を確保 通気性のあるワーク(※2)でも吸着可能。 ※1)内蔵エジェクタ3本の仕様値。 ※2)段ボールなど漏れの多いワーク。
-

ロボットハンド用真空発生器VYR
- 参考価格
- お問い合わせください
ロボットハンドに直接取付可能な真空破壊機能付真空発生器。 特長 1.ロボット(P.C.D. 31.5)にダイレクト取付けが可能。 2.小型・低背タイプ。 ノズル径0.5mm&0.7mmタイプ:高さ20mm、ノズル径1.0mm&1.2mmタイプ:高さ28mm。 3.真空破壊機能を標準装備。 破壊エアの配管が無くても真空破壊可能。破壊流量と破壊時間の調整が可能なニードル付。 4.吸着・破壊サイクルの高速化を実現。 5.エジェクタ排気騒音は、75dB[A]以下。 ノズル径0.5mm&0.7mmタイプ:65dB[A]以下、ノズル径1.0mm&1.2mmタイプ:75dB[A]以下。(当社での簡易測定による。) 6.ノズル径0.5mm&0.7mmタイプは、最大4口の真空ポート。 圧力センサの取付可能。(圧力センサ取付時は3口になります。) 7.ノズル径1.0mm&1.2mmタイプは、2口の真空ポート。 圧力センサ取付専用ポートを用意。 8.真空破壊用エアタンク内蔵。 ノズル径0.5mm&0.7mmタイプ:0.404mL、ノズル径1.0mm&1.2mmタイプ:0.615mL 9.真空破壊エアリザーブタンク容量増設可能。 タンク増設ポートにエアチューブとキャップを配管して増設。(ノズル径1.0mm&1.2mmタイプのみ)
-
ロボットハンドHS
- 参考価格
- お問い合わせください
ロボットにピスコの真空パッドまたはチャック1個を取付可能なフランジ。 特長 1.真空パッド取付用のHSPタイプとエアチャック取付用のHSCタイプを用意。 2.P.C.D. 31.5 M5にダイレクト取付可能。 各ロボットメーカーに合わせた変換アタッチメントも用意。 3.エア配管は、横取出と上取出の2方向が可能。 スカラロボットのシャフト中空タイプへ取付けの場合、インライン配管が可能。
-
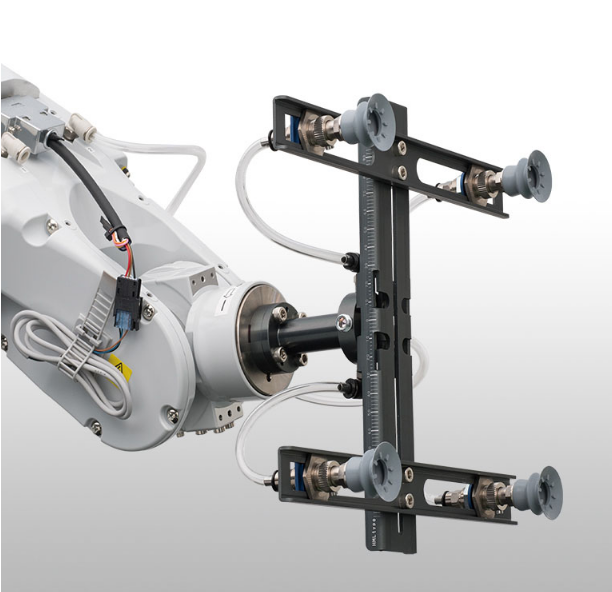
ロボットハンドHML
- 参考価格
- お問い合わせください
ロボットにピスコの真空パッドを最大16個取付可能なフレームシステム。 特長 1.ハンド設計不要。ロボットへ直付け可能。 2.メインバーとパッドバー共に長さが異なる2種類を用意。 フランジ、メインバー、パッドバーそれぞれ2種類を任意に組合せ可能。(8パターンの組合せが可能。) 3.ロボットとハンドを繋ぐ『ロボットフランジ変換アタッチメント』を各ロボットメーカーに合わせ用意。 ※)概ね6kg以下の可搬質量のロボットを対象にしております。 4.曲げ形状により強度を確保。アルミ素材で超軽量。 5.バーは、位置決めに大変便利な目盛り付き。 6.パッド配置に合わせた特注品も小ロットで対応可能。
-

平行チャック マルチタイプ
- 参考価格
- 26,950~34,100円
高精度(繰返し精度:±0.01mm)。外径/内径把持の両用可能。単動・複動、センサのオプションも選択可能。 特長 1.1つのボディで豊富な把持仕様。 外径把持と内径把持の両用可能。エア把持とバネ把持の両用可能。 2.独自のローラガイド機構。 ローラ間の距離を長く取り、スムーズな動作で確実なチャッキング。 横モーメント荷重に強い、Eタイプ(E型止輪付)も用意。 3.極薄ボディな4mmストローク。 極薄10mmボディでありながら、φ8mmシリンダを内蔵で高把持力。 小ピッチ多連使いにも便利に活躍。 4.ショートボディな6mmストローク。 装置をコンパクトに構築可能なワイドストローク仕様。 5.超軽量な8mmストローク。 従来の同等把持力のエアチャックに比べて質量1/2。 6.エア供給ポートは、側面とセンタポートから選択可能。 7.別売りでセンサスイッチを用意。 用途に合わせ6タイプから選定可能。 8.ツメ(アタッチメント)の位置ズレ防止。 フィンガ部に基準溝付。ツメ(アタッチメント)の位置再現性が向上し、位置ズレ防止に利用可能。 9.アタッチメントを用意。(別売り) ●使用流体 空気(濾過済み圧縮空気に限る) ●使用圧力範囲 0.3~0.5MPa ●使用温度範囲 5~60℃(ただし、凍結なきこと) ●給油 無給油 ●最大使用頻度 単動:120cpm/複動:180cpm
-

レバーチャック 単動閉タイプ
- 参考価格
- 8,580~17,270円
軽量、超小型のステンレス鋼製閉チャック。 特長 1.ワークストッパによって、安定したチャッキングが可能。 フローティング付は、ワークストッパをより有効に利用でき、突き当てによる破損も防止します。 (ツメ形状:Kタイプ) 2.Kタイプツメは、生ツメブランクを用意。 R合わせのため、芯ズレが無くビス1本で取付けが可能。
-

3爪平行チャック
- 参考価格
- 50,600~54,450円
円筒形ワークの把持に最適。 特長 1.コンパクトなボディ。 2.省スペースに設置可能。 3.大型円形ピストン駆動によるクサビカム機構で高把持力。 4.高い繰返し精度:±0.01mm。 5.別売りでセンサスイッチとロボットハンド取付用フランジ(特殊品)を用意。 6.ロボットハンドに適したダイレクト配管が可能。 チャック上面からのネジ接続不要なエア供給。

