FOODTOWNアドバイザーが
パラレルロボット(パッケージ含む)を徹底解説!
FOODTOWNアドバイザーが
パラレルロボット(パッケージ含む)を徹底解説!
パラレルロボット(パッケージ含む)とは?
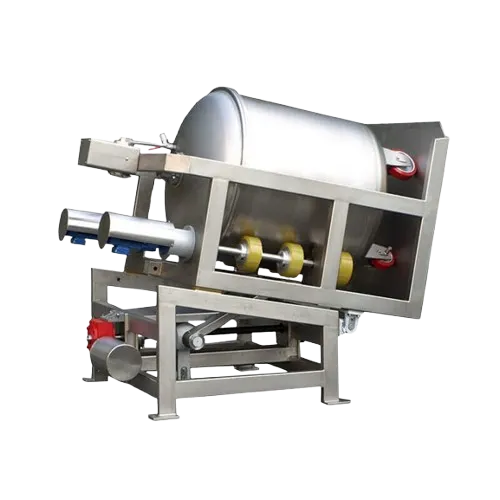
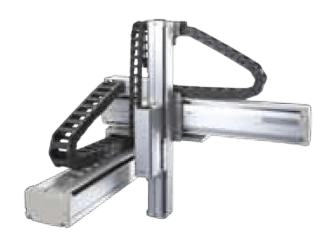
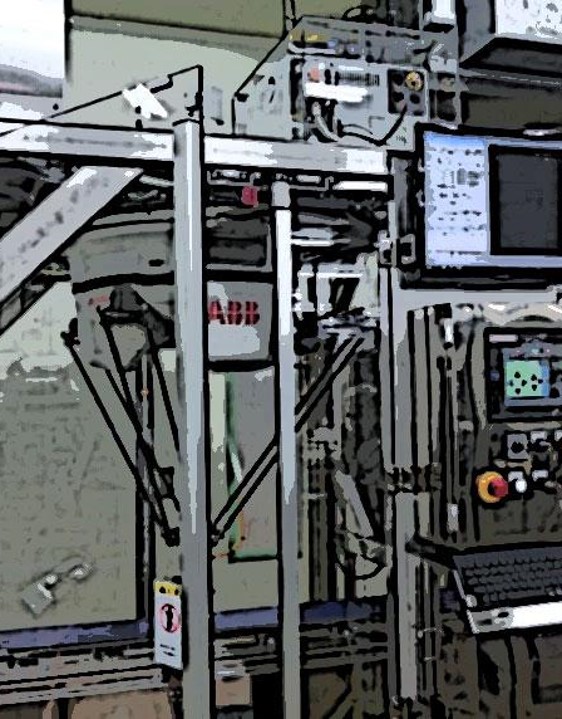
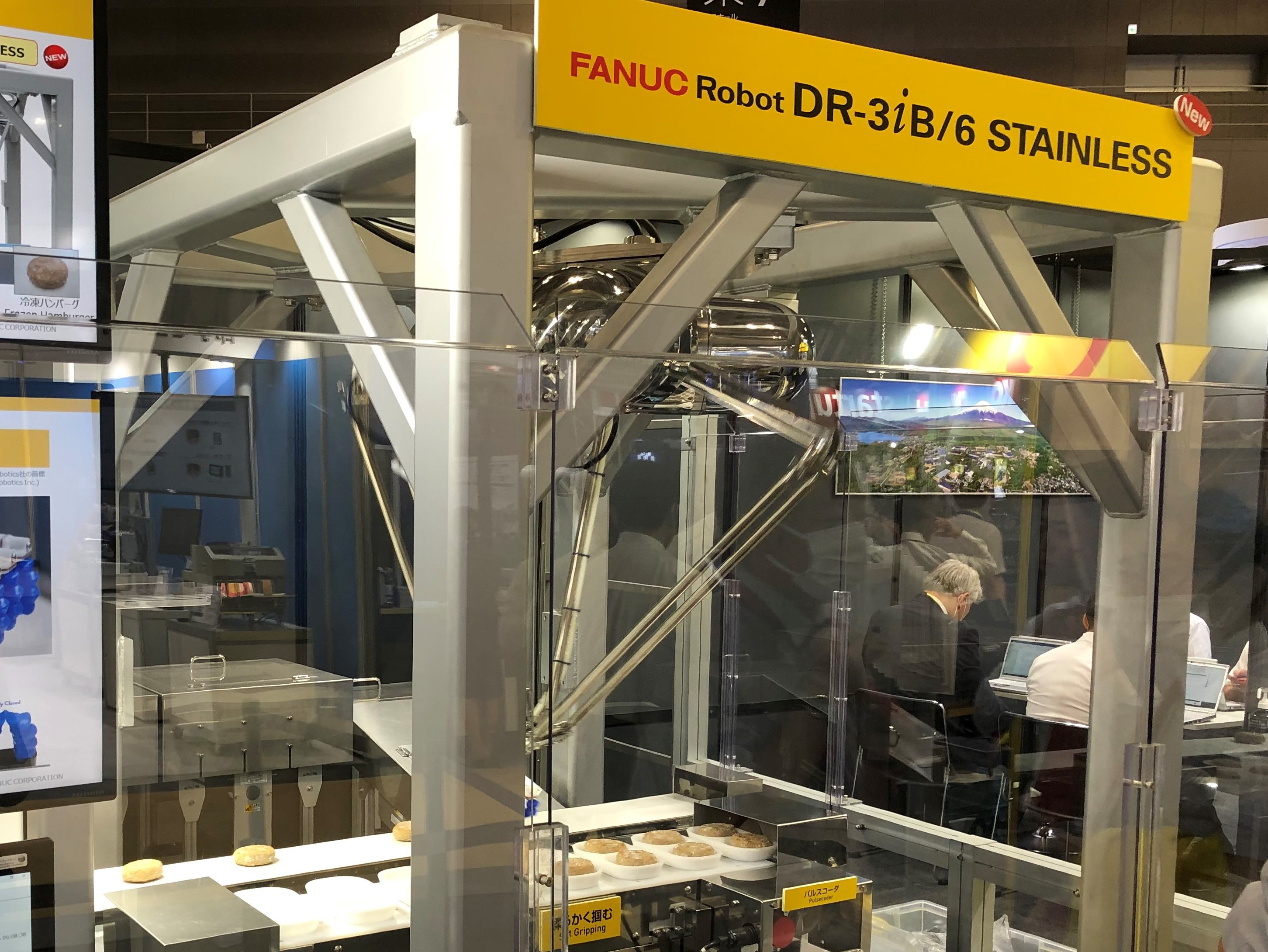
パラレルロボットとは、複数のコンピューター制御シリアルチェーン(リンクやジョイントで構成される3本のアームが並列に繋がれたもの)を使用してアーム先端部一点の動きをサポートする産業用ロボットです。
構造はいたってシンプルで主にモーターやペアリング、リンクアームなどによって構成されています。その為メンテナンス性にも優れています。
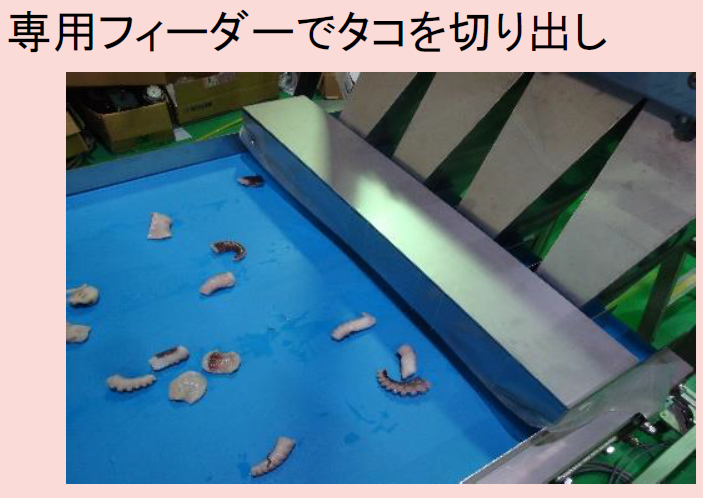
従来型の多関節ロボットに比較して高速かつ高出力で高精度な動作に優れているので主に自動化設備のピックアップ作業などで活用されています。

-
パラレルロボットの種類、原理、使用用途について
-
パラレルロボットの価格について
-
パラレルロボットの選定ポイント、導入時の確認ポイントについて
-
パラレルロボット導入後のトラブル事例と事前対策ポイントについて
製品詳細確認・カタログ無料ダウンロード可能



「いろんな製品があって選ぶ基準が分からない…」そんなアナタに
ヒアリングシート
3つのメリットと特徴
-
MERIT 1
- 自動化すべき工程が
明確になる! - 相談は3分で登録完了。自動化したい工程と製造条件を選択するだけ!
- 自動化すべき工程が
-
MERIT 2
- 相談するだけで最適な
メーカー紹介に繋がる! - 1,000社、10,000を超える商品から最適な情報を紹介!
- 相談するだけで最適な
-
MERIT 3
- 補助金や助成金の
情報紹介も可能! - 自動化するために活用できる全国の補助金情報も紹介!
- 補助金や助成金の