FOODTOWNアドバイザーが
ロボットハンド(パッケージ含む)を徹底解説!
FOODTOWNアドバイザーが
ロボットハンド(パッケージ含む)を徹底解説!
ロボットハンド(パッケージ含む)とは?
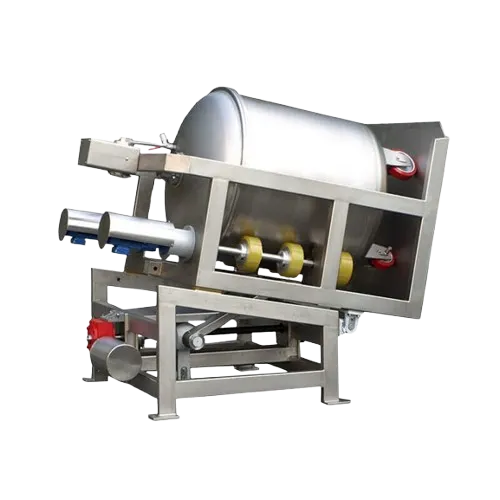
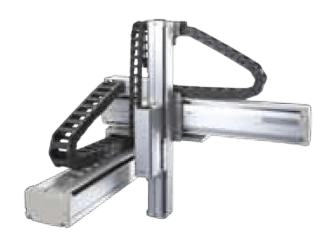
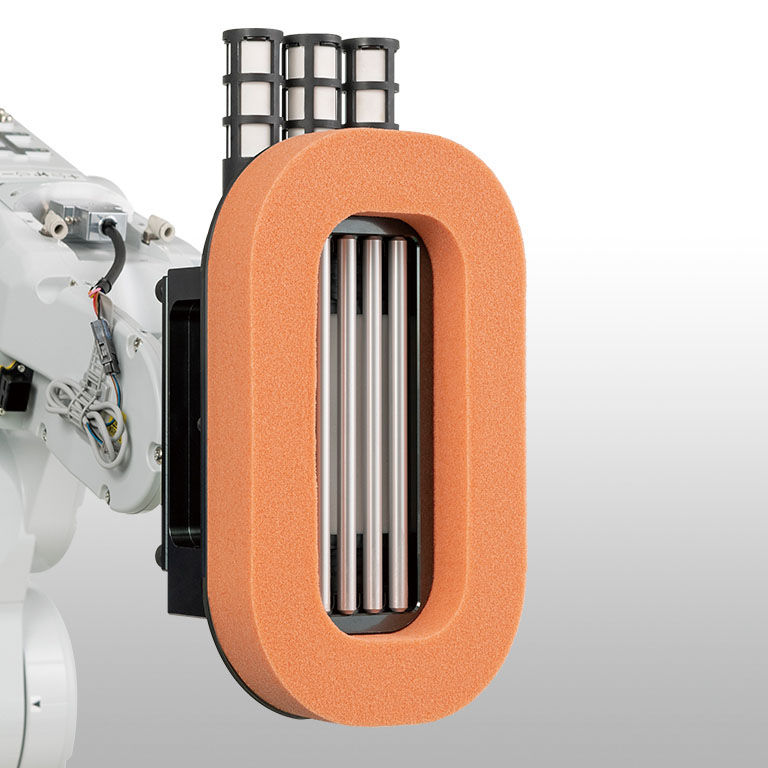
ロボットハンドとは、「ハンドエフェクタ」とも呼ばれるロボットアームの先端に取り付けて作業を行うものです。
ロボットハンドの他にも、グリッパ、ハンド、チャックなどと呼ばれる場合もあります。ものを掴む、吸着する、ねじを回す、組み立てるなどの用途で多く使われています。近年では、触ったときの感覚を電気信号に変換する触覚センサー搭載のロボットハンドも登場しています。 野菜や果物などの、個々で柔らかさの異なるものも掴めるようになり、人の指先に近い繊細な作業も可能になりました。
ロボットハンドの種類、選定ポイント、トラブル事例について解説します。
-
ロボットハンドの種類、原理、使用用途について
-
ロボットハンド価格について
-
ロボットハンドの選定ポイント、導入時の確認ポイントについて
-
ロボットハンドに関するトラブル事例、事前対策ポイントについて
製品詳細確認・カタログ無料ダウンロード可能








「いろんな製品があって選ぶ基準が分からない…」そんなアナタに
ヒアリングシート
3つのメリットと特徴
-
MERIT 1
- 自動化すべき工程が
明確になる! - 相談は3分で登録完了。自動化したい工程と製造条件を選択するだけ!
- 自動化すべき工程が
-
MERIT 2
- 相談するだけで最適な
メーカー紹介に繋がる! - 1,000社、10,000を超える商品から最適な情報を紹介!
- 相談するだけで最適な
-
MERIT 3
- 補助金や助成金の
情報紹介も可能! - 自動化するために活用できる全国の補助金情報も紹介!
- 補助金や助成金の