FOODTOWNアドバイザーが
3Dビジョンセンサーを徹底解説!
FOODTOWNアドバイザーが
3Dビジョンセンサーを徹底解説!
3Dビジョンセンサーとは?
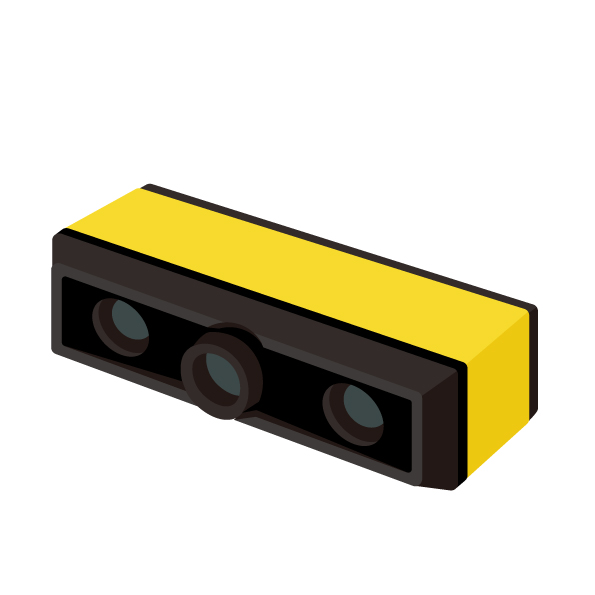
3Dビジョンセンサーとは、製品を3次元的に認識する計測器です。
3DビジョンのDは次元を表すdimensionが由来の言葉です。3Dビジョンセンサーで製品を3次元的に認識することにより、ロボットがバラ積み状態の製品を正確に把持することができます。
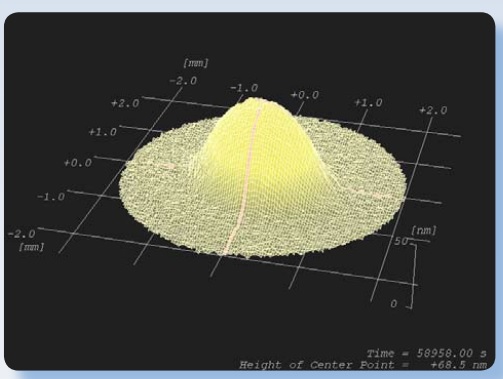
普段私たちが目で見ている映像は全て3次元の立体的な映像でとらえています。一方カメラで撮影するような画像は、平面である2次元画像になります。画像認識を行うとなると2次元では対応できないことも多く、そこで3Dセンサーを用います。具体的には画像データと合わせて奥行を表す深度も計測します。
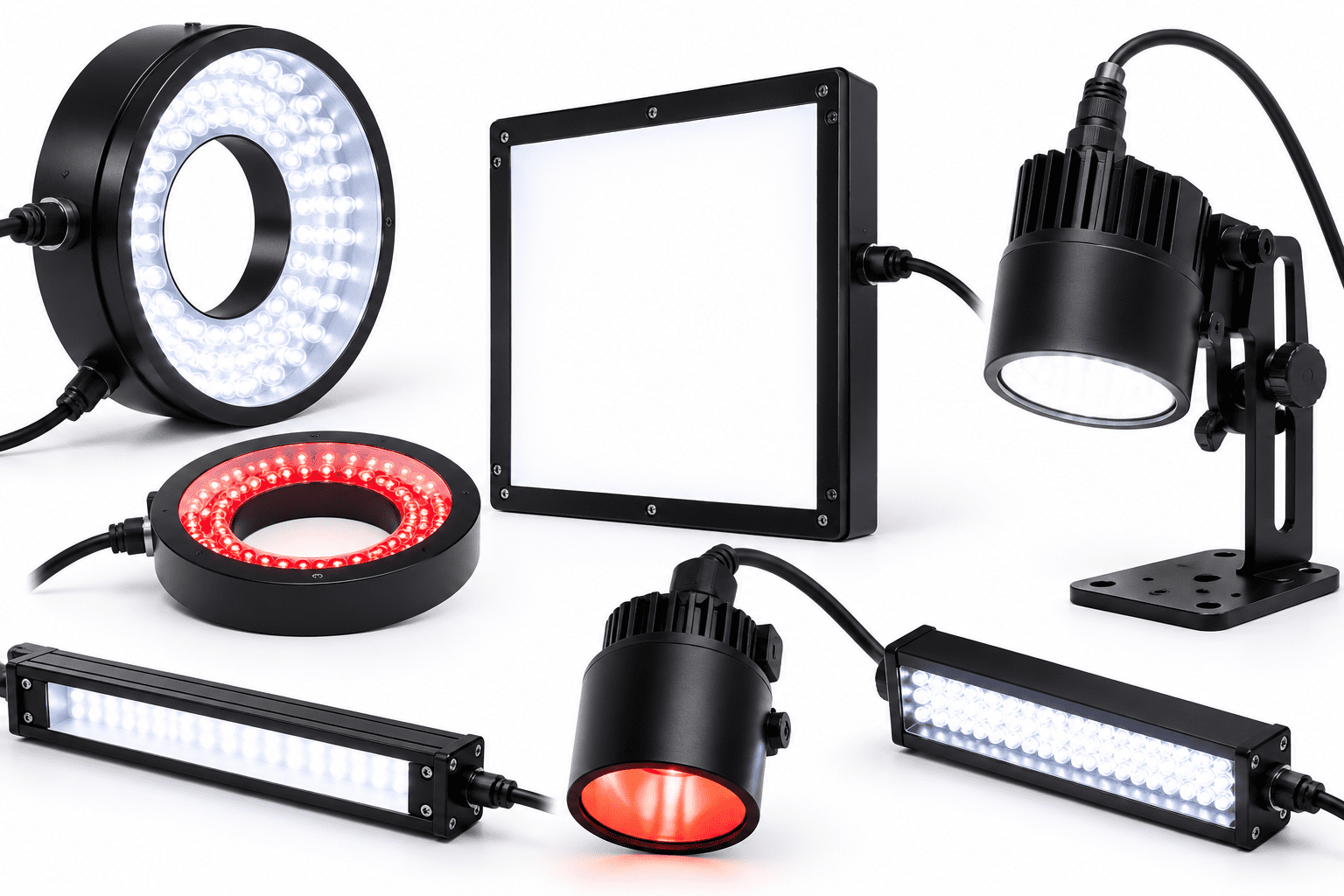
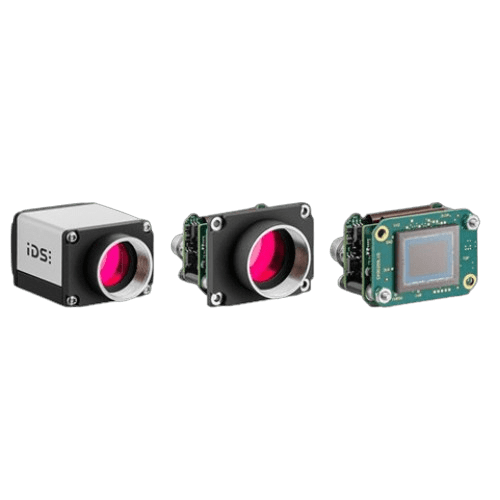
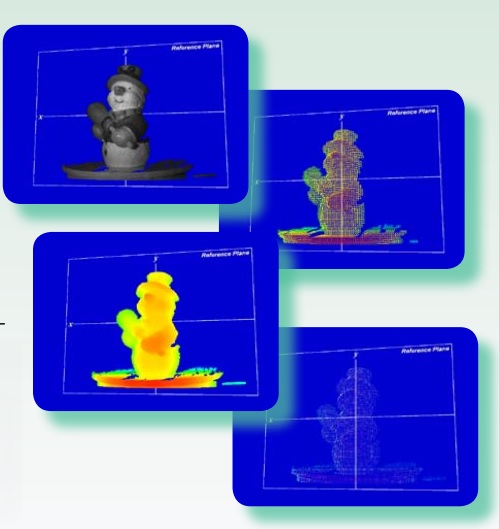
3Dビジョンはプロジェクタとカメラで構成されています。3Dビジョンを使用して製品を認識した画像は、小さな3次元の座標情報を持った点の集合体でできています。この点の集合体を点群といいます。点群はプロジェクタから照射された模様を、カメラで認識することにより画像データを取得します。
3Dビジョンセンサーの種類、選定ポイント、価格について解説します。
-
3Dビジョンセンサー種類、原理、使用用途について
-
3Dビジョンセンサー価格について
-
3Dビジョンセンサー選定ポイント、導入時の確認ポイントについて
-
3Dビジョンセンサー導入後のトラブル事例と事前対策ポイントについて
製品詳細確認・カタログ無料ダウンロード可能
「いろんな製品があって選ぶ基準が分からない…」そんなアナタに
ヒアリングシート
3つのメリットと特徴
-
MERIT 1
- 自動化すべき工程が
明確になる! - 相談は3分で登録完了。自動化したい工程と製造条件を選択するだけ!
- 自動化すべき工程が
-
MERIT 2
- 相談するだけで最適な
メーカー紹介に繋がる! - 1,000社、10,000を超える商品から最適な情報を紹介!
- 相談するだけで最適な
-
MERIT 3
- 補助金や助成金の
情報紹介も可能! - 自動化するために活用できる全国の補助金情報も紹介!
- 補助金や助成金の